FORUM CTRLX AUTOMATION
ctrlX World Partner Apps for ctrlX AUTOMATION
Dear Community User! We have started the migration process.
This community is now in READ ONLY mode.
Read more: Important
information on the platform change.
- ctrlX AUTOMATION Community
- Forum ctrlX AUTOMATION
- ctrlX MOTION
- Problem with axis profile
Problem with axis profile
- Subscribe to RSS Feed
- Mark Topic as New
- Mark Topic as Read
- Float this Topic for Current User
- Bookmark
- Subscribe
- Mute
- Printer Friendly Page
- Mark as New
- Bookmark
- Subscribe
- Mute
- Subscribe to RSS Feed
- Permalink
- Report Inappropriate Content
02-16-2023 02:07 PM
Hello,
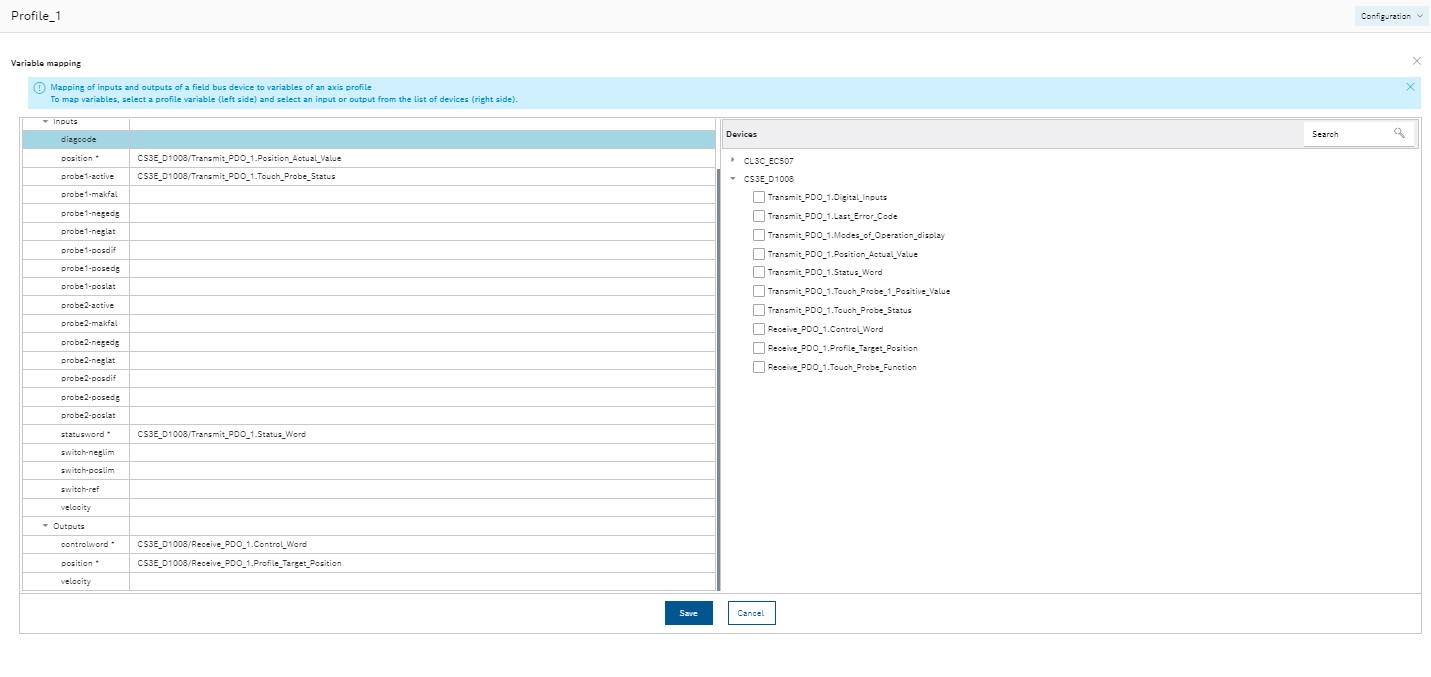
I have a problem with axis profile. I use CANopen over Ethercat stepper drivers. I encountered no difficulties in defining the axis. When defining the signals, I have entered the minimum requirements for the profile to be defined.
PIC 1
Unfortunately after trying to start my axis throws an error which can be seen in the picture below.
PIC 2
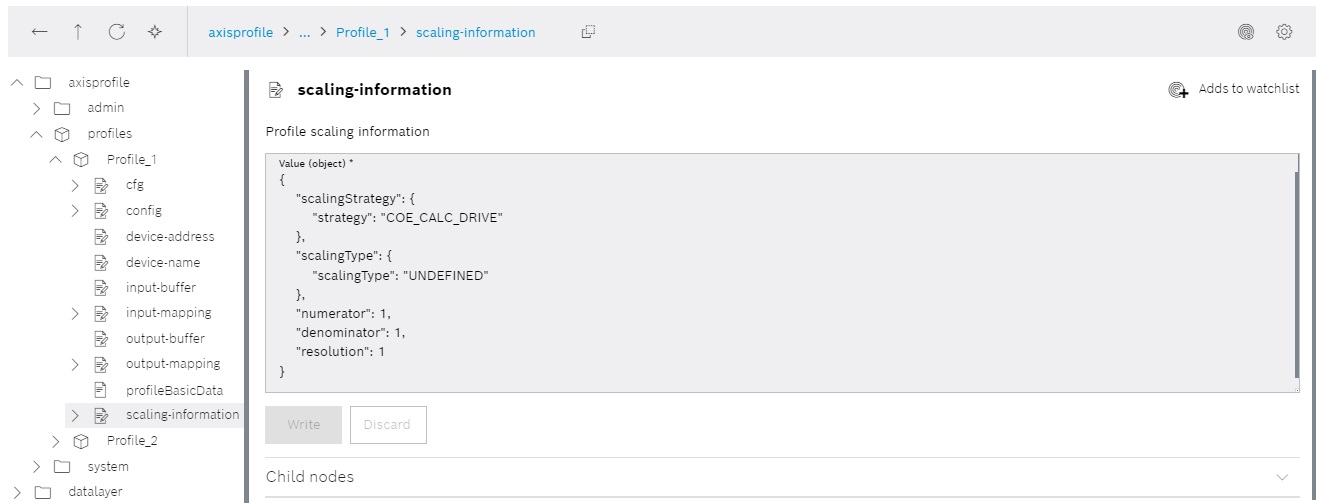
When checking the Data layer, I noticed that the data in the scaling-information is not correct, and I tried several times to enter the correct data, but without success. Every time I make some corrections and write them, it shows me a message that the new data has been saved and after the message disappears, the corrected data goes back to its previous state.
Bifore add data:
PIC 3
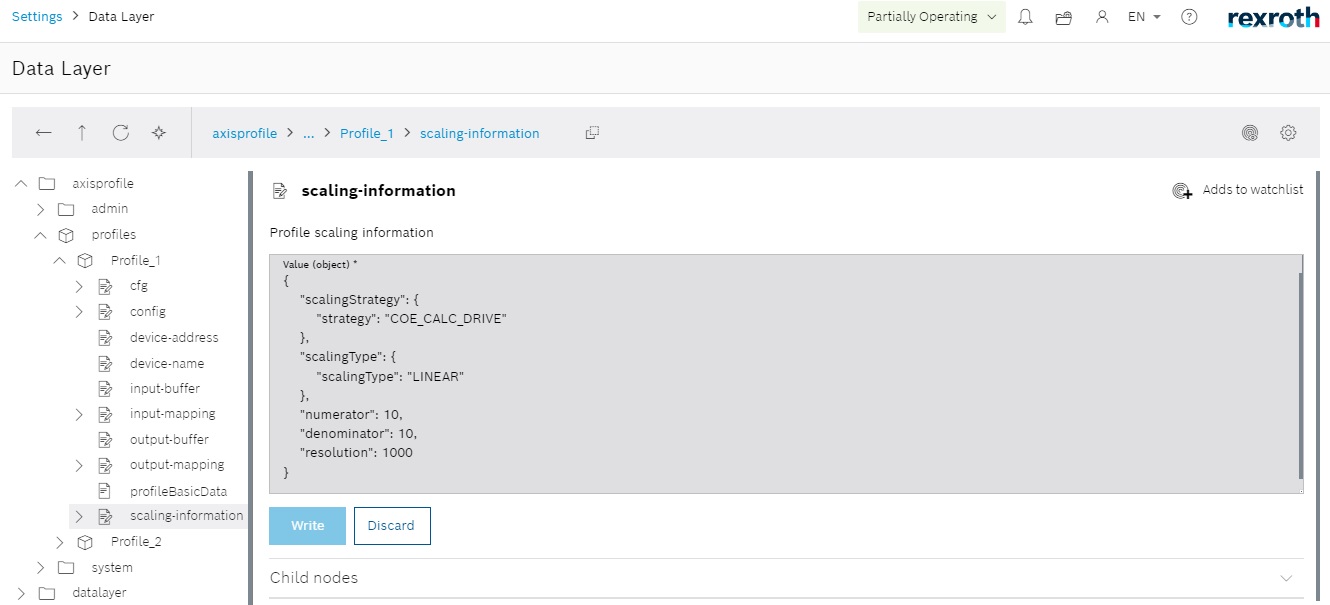
After add data:
PIC4
PIC5
I try to download also the configuration file, to adjust these parameters and upload it again. But without success.
Can you tell me how I can change this data?
Solved! Go to Solution.
- Mark as New
- Bookmark
- Subscribe
- Mute
- Subscribe to RSS Feed
- Permalink
- Report Inappropriate Content
02-16-2023 03:36 PM
Seems that there is something wrong with your axisprofile json
the last entries should be like this
},
"profileBasicData": {
"name": "Profile_5",
"type": "CANopen_over_Ethercat"
},
"scalingInfo": {
"denominator": 1,
"numerator": 1,
"resolution": 1,
"scalingStrategy": {
"strategy": "COE_CALC_DRIVE"
},
"scalingType": {
"scalingType": "UNDEFINED"
}
}
}
You can try to write this in your json or delete the axis profile and add it again.
- Mark as New
- Bookmark
- Subscribe
- Mute
- Subscribe to RSS Feed
- Permalink
- Report Inappropriate Content
02-17-2023 03:55 AM
Hello,
If the driver you are using not Rexroth driver, the strategy value in picture4 should be COE_CALC_CONTROL instead of COE_CALC_DRIVE.
Maybe it can help by fix this value.
- Mark as New
- Bookmark
- Subscribe
- Mute
- Subscribe to RSS Feed
- Permalink
- Report Inappropriate Content
02-17-2023 09:40 AM
Hi
Thanks for your help!
It did accept the change, but unfortunately the red message from pic 2 remained
- Mark as New
- Bookmark
- Subscribe
- Mute
- Subscribe to RSS Feed
- Permalink
- Report Inappropriate Content
02-20-2023 02:15 AM
Hello,
I gauss the operation mode should be set to position mode on drive side.
Could you please offer more information about the diagnostic log (when the red error occur ,click the red link)?
- Mark as New
- Bookmark
- Subscribe
- Mute
- Subscribe to RSS Feed
- Permalink
- Report Inappropriate Content
02-20-2023 03:01 PM
- Mark as New
- Bookmark
- Subscribe
- Mute
- Subscribe to RSS Feed
- Permalink
- Report Inappropriate Content
02-21-2023 02:11 AM
Hello,
In order to catch more detail information from log file, here are two extra settings before export the log:
step1: select axisprofile trace information on data layer

step2: trigger the error.
final: export the log.
Once the detail error information uploaded, we can check it more detail.
- Mark as New
- Bookmark
- Subscribe
- Mute
- Subscribe to RSS Feed
- Permalink
- Report Inappropriate Content
02-21-2023 07:32 AM
- Mark as New
- Bookmark
- Subscribe
- Mute
- Subscribe to RSS Feed
- Permalink
- Report Inappropriate Content
02-21-2023 09:06 AM
Hello,
Please add some filter item before download the log file, then we will get some trace information about axis-profile.


- Mark as New
- Bookmark
- Subscribe
- Mute
- Subscribe to RSS Feed
- Permalink
- Report Inappropriate Content
02-21-2023 09:55 AM
- Mark as New
- Bookmark
- Subscribe
- Mute
- Subscribe to RSS Feed
- Permalink
- Report Inappropriate Content
02-22-2023 02:32 AM
Hello,
In the picture 1, "probe1-active" are mapped , but current touch-probe function not support CoE.
I suggest just keep position and statusword for inputs, controlword and position for outputs.

- Mark as New
- Bookmark
- Subscribe
- Mute
- Subscribe to RSS Feed
- Permalink
- Report Inappropriate Content
02-22-2023 07:19 AM
Hi,
I remove probe1-active after I make this tema and I keep position and statusword for inputs, controlword and position for outputs, but efekt is same. Тhat's exactly why i made this topic. I see no good reason for it to give me messages and not allow me to start axes.
- Mark as New
- Bookmark
- Subscribe
- Mute
- Subscribe to RSS Feed
- Permalink
- Report Inappropriate Content
03-23-2023 08:26 PM
Did you get this sorted out? I'm running into a similar situation and setting the scaling type in the JSON to either LINEAR or ROTARY instead of UNDEFINED got me a step further. Still having issues, but you might try that.
- Mark as New
- Bookmark
- Subscribe
- Mute
- Subscribe to RSS Feed
- Permalink
- Report Inappropriate Content
03-24-2023 08:18 AM
Unfortunately, I'm still struggling to get rid of the error I get when launching the Motion app. I also asked other colleagues for assistance, but to no avail. No one can tell me why I get this error. Entercat is working as I can see through CtrlX Engineering that I have signal exchange, I even managed to manually enable the motor, but in CtrlX Core it doesn't see the motor driver and there is no signal exchange, which is very strange. Unfortunately, I'm not very familiar with CtrlX Core, and due to the lack of information, what exactly is the problem with the axis profile, I don't know what to do to start a motion app (it will be much easier for me to write the program later)
- Mark as New
- Bookmark
- Subscribe
- Mute
- Subscribe to RSS Feed
- Permalink
- Report Inappropriate Content
03-24-2023 12:07 PM
Hello, i tried CoE with my testset (but only IndraDrive with CoE) an this is working.
In my case i had to change the scaling strategy to COE_CALC_DRIVE and scalingType ROTARY in my JSON for the axisprofile.
If you have still problems
- set the traces for axisprofile (as decribed from Linhan)
-try to switch the axisprofile to running
-if you run into your problem generate a system report and add it here

- Mark as New
- Bookmark
- Subscribe
- Mute
- Subscribe to RSS Feed
- Permalink
- Report Inappropriate Content
03-24-2023 12:51 PM
- Mark as New
- Bookmark
- Subscribe
- Mute
- Subscribe to RSS Feed
- Permalink
- Report Inappropriate Content
03-24-2023 01:13 PM
Hi, the axisprofile tries to read out the drive operation mode (first line)
Is it possible that there is a problem with the parameters of your drive, especially the operation mode?
| Name: Profile_1; Type: CoE; Addr: 1001; current drive operation mode: Unknown, which is not supported |
| Name: Profile_1; Type: CoE; Addr: 1001; CoE-Read (SYNC): Object Index=6060dh, SubIndex = 0000dh, Address: fieldbuses/ethercat/master/instances/ethercatmaster/device_access/coe/sdo |
| Name: Profile_1; Type: CoE; Addr: 1001; New acceleration data scaling LSB weight = 1.000000 |
| Name: Profile_1; Type: CoE; Addr: 1001; New torque data scaling LSB weight = 1.000000 |
Name: Profile_1; Type: CoE; Addr: 1001; New velocity data scaling LSB weight = 1.00000 |
In my IndraDrive there is a startup parameter configured
Can you check if in your device a parameter like this exists?
Or add the configuration of your project (inlc. IO-Project).
- Mark as New
- Bookmark
- Subscribe
- Mute
- Subscribe to RSS Feed
- Permalink
- Report Inappropriate Content
03-24-2023 01:53 PM
- Mark as New
- Bookmark
- Subscribe
- Mute
- Subscribe to RSS Feed
- Permalink
- Report Inappropriate Content
03-24-2023 02:21 PM
You please append your current configuration?
Manage app data --> Save to archive
- Mark as New
- Bookmark
- Subscribe
- Mute
- Subscribe to RSS Feed
- Permalink
- Report Inappropriate Content
03-24-2023 02:40 PM
I think CSP - Mode should be the right one

- Mark as New
- Bookmark
- Subscribe
- Mute
- Subscribe to RSS Feed
- Permalink
- Report Inappropriate Content
03-24-2023 03:05 PM
- Mark as New
- Bookmark
- Subscribe
- Mute
- Subscribe to RSS Feed
- Permalink
- Report Inappropriate Content
03-24-2023 03:39 PM
Ok, at the moment i can not see any problems with the configuration.
May be the axisprofile has a problem with reading the parameter.
I will try to clarify on monday.
- Mark as New
- Bookmark
- Subscribe
- Mute
- Subscribe to RSS Feed
- Permalink
- Report Inappropriate Content
03-27-2023 09:12 AM - edited 03-27-2023 09:16 AM
Hi, please trying the set blow:
1. As Linhan said above, plese don't mapping the item other than status-/control word, position. Because the PDOs in red box are currently not available for CoE profile:

2. According to the trace error, the error is clearly points to that the operation mode is unknow, currently, only operation mode 8(Cyclic sync position mode) is available for CoE profile, therefore, the operation mode should be 8, as the red box(0x6061) in the figure blow:

The 0x6060 could be set here:

After set the value as 8 here, download to ctrlX Core is also necessary(red box). But I suggest to set in drive software.
3. I checked the IO configuration, because I don't have the hardware, so only part information are available for me:

The receive PDO2 - 4 and transmit PDO 2 looks strange on my side. Please try to create a new IO project for configuration and please do not add PDOs other than status-/control word, position.
4. Another tip is: Axisprofile does not supports profile type change after profile has been created. So please always select CANopen_over_Ethercat, if you need a CoE profile.

5.

The parameters in figure above also needs to modify, but it may not leads to booting error in motion.
- Mark as New
- Bookmark
- Subscribe
- Mute
- Subscribe to RSS Feed
- Permalink
- Report Inappropriate Content
03-28-2023 12:22 PM
Hello,
I tried the step by step instruction you suggested but without any result.
The situation is the same.

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Ethercat is working as I check it.
I did an experiment and got another servo controller from a colleague that I'm sure works with CtrlX Core and wired it to my system. It turned out that the result is the same, which makes me think that the problem is with the Motion app, and not with the servo driver I'm using. I HAVE A QUESTION. Will resetting my CtrlX Core to factory settings fix it? The other option is to upgrade to a higher version.
- Mark as New
- Bookmark
- Subscribe
- Mute
- Subscribe to RSS Feed
- Permalink
- Report Inappropriate Content
04-03-2023 08:57 AM - edited 04-03-2023 09:02 AM
Thanks to Michael_A Problem solved.
It turned out to be a bad installation of the Motion app - for some reason all the tools didn't load, which is why the Motion app didn't start at all.
We uninstalled the app and reinstalled it until the installation was done correctly and all the tools were loaded.
Thanks again to Michael_A for his assistance.