FORUM CTRLX AUTOMATION
ctrlX World Partner Apps for ctrlX AUTOMATION
Dear Community User! We have started the migration process.
This community is now in READ ONLY mode.
Read more: Important
information on the platform change.
- ctrlX AUTOMATION Community
- Forum ctrlX AUTOMATION
- ctrlX DRIVE
- Re: S-0-0530, Clamping torque does not seem to work as intended
S-0-0530, Clamping torque does not seem to work as intended
- Subscribe to RSS Feed
- Mark Topic as New
- Mark Topic as Read
- Float this Topic for Current User
- Bookmark
- Subscribe
- Mute
- Printer Friendly Page
- Mark as New
- Bookmark
- Subscribe
- Mute
- Subscribe to RSS Feed
- Permalink
- Report Inappropriate Content
10-12-2022 12:09 PM
We are comissioning a machine that is using C1300 and C0600.
According to the manual the torques should be limited by this parameter when C1300 and C0600 is active:

But it isn't:

As you can se in the picture above, C1300 is active, S530 has the value of 25% but the actual torque is 40.1
Using firmware 03V12
Solved! Go to Solution.
- Mark as New
- Bookmark
- Subscribe
- Mute
- Subscribe to RSS Feed
- Permalink
- Report Inappropriate Content
10-12-2022 06:06 PM
Please provide parameter file in format "all parameters". It might be that due to other settings like standstill (S-0-0124) and positioning window S-0-0057 or S-0-0261) the positive stop command is not acknowledged correctly.
- Mark as New
- Bookmark
- Subscribe
- Mute
- Subscribe to RSS Feed
- Permalink
- Report Inappropriate Content
11-22-2022 03:42 PM
Any news here or can this topic be closed?
- Mark as New
- Bookmark
- Subscribe
- Mute
- Subscribe to RSS Feed
- Permalink
- Report Inappropriate Content
11-23-2022 08:19 AM
Hello Uwe,
I only have a backup parameters avaiable.
But as you see in the parameter group; the torque feedback (40.1%) is higher then the clamping torque (25.0%), and C1300 is active.
And in IndraWorks the Effective peak torque limit is 40% and not 25.0% as expected with C1300 active.
/Andreas
- Mark as New
- Bookmark
- Subscribe
- Mute
- Subscribe to RSS Feed
- Permalink
- Report Inappropriate Content
11-23-2022 08:47 AM
As said we need the parameters in format "all parameters", otherwise development cannot really have a look into this issue. Please provide this information!
- Mark as New
- Bookmark
- Subscribe
- Mute
- Subscribe to RSS Feed
- Permalink
- Report Inappropriate Content
11-25-2022 08:23 AM

- Mark as New
- Bookmark
- Subscribe
- Mute
- Subscribe to RSS Feed
- Permalink
- Report Inappropriate Content
11-02-2023 03:43 PM
Uwe,
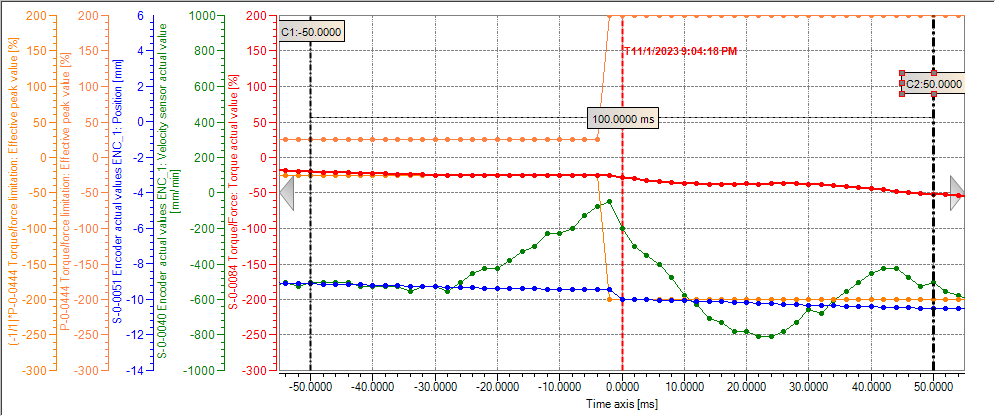
I saved a .par file with all parameters (we were doing the testing with "Ax25_PickAxisY"). I also saved an oscilloscope trace of one of the drive controlled homing that shows the issue. It looks like it is using S-0-0530 as the limit, and when the torque feedback exceeds the clamping force the axis reference is set. After the reference is set it continues to move using S-0-0092. I think the solution would be to keep using S-0-0530 as the torque limit until the "Position at reference point" move is done.
- Mark as New
- Bookmark
- Subscribe
- Mute
- Subscribe to RSS Feed
- Permalink
- Report Inappropriate Content
11-03-2023 12:44 PM
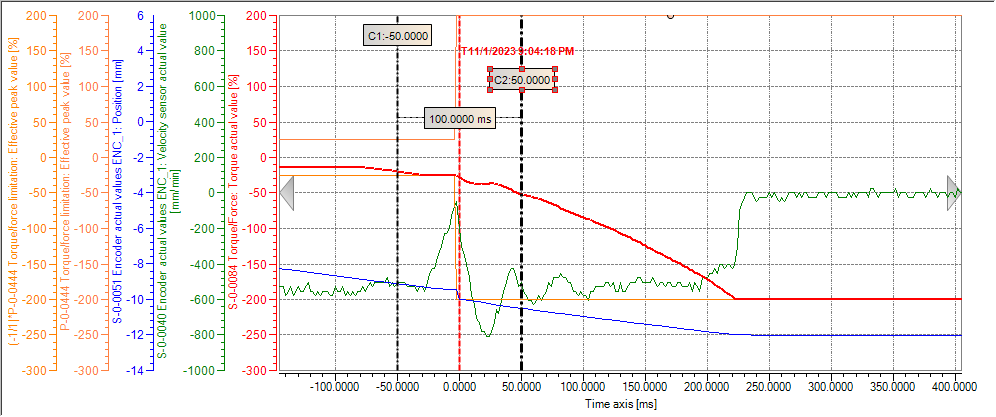
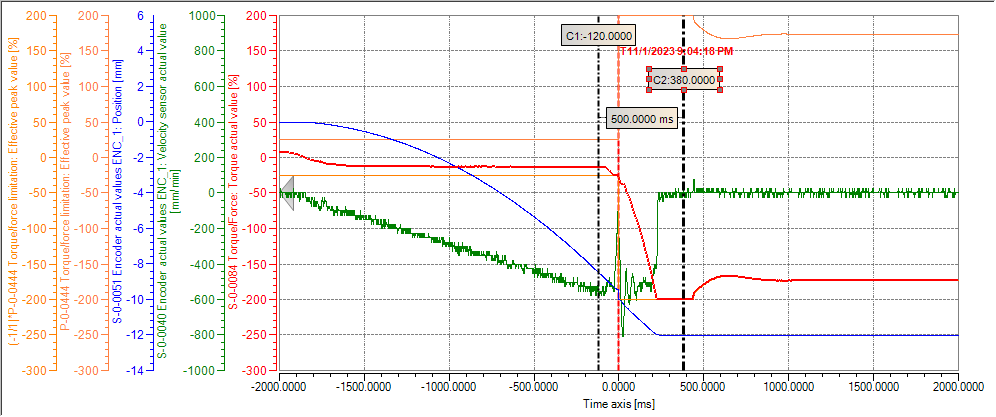
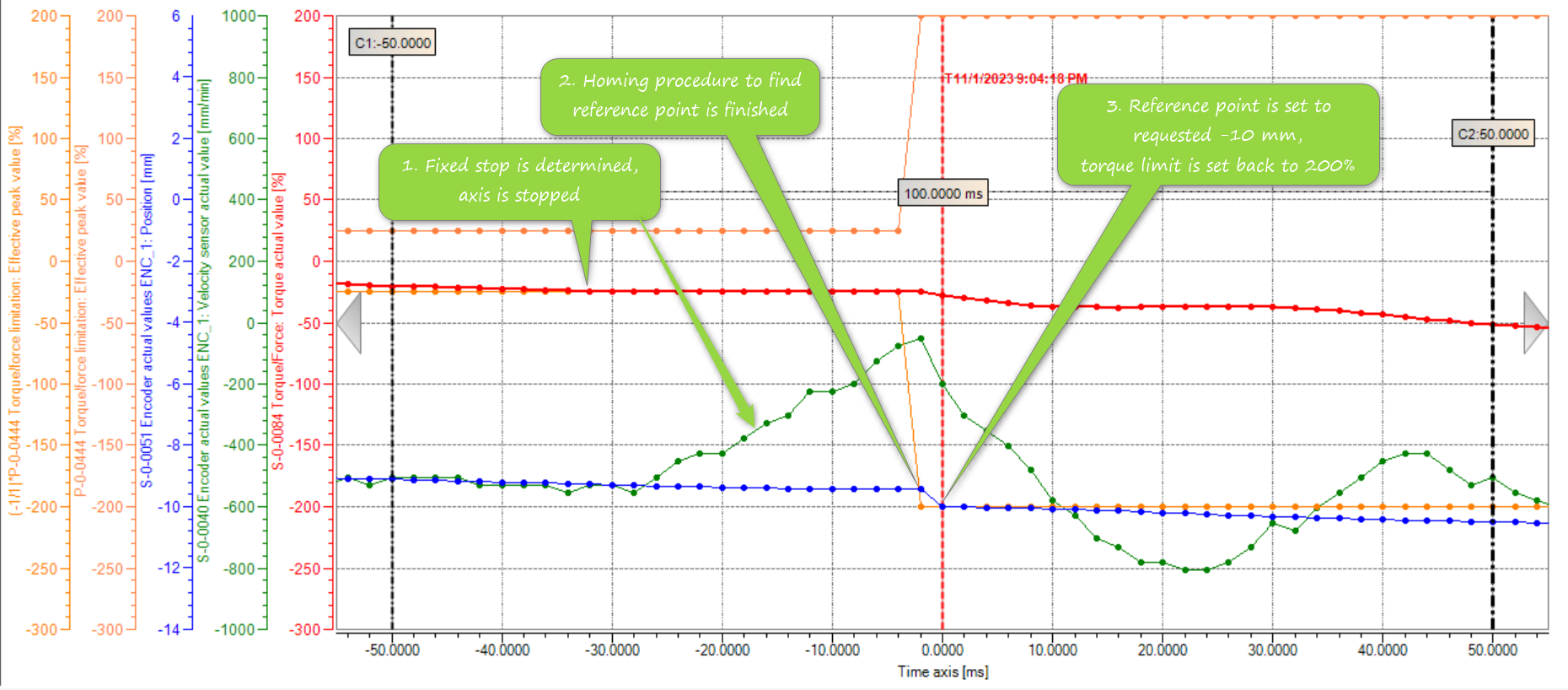
As far as I see it the procedure works as intended:
- homing takes place to get to fixed stop (restricted to clamping torque)
- reference point is set, at same time torque limit is set back to normal value (no longer the clamping torque is valid)
- position to reference point taking offset into account takes place --> in here you might set the offset or the reference point different
See evaluations in attachment.
- Mark as New
- Bookmark
- Subscribe
- Mute
- Subscribe to RSS Feed
- Permalink
- Report Inappropriate Content
11-16-2023 11:35 AM
S-0-0530.0.0 Clamping torque can't be select in mater communication :

{kind=link}
{kind=link}
{kind=link}
{kind=link}
why - is it me who has misunderstood the use of the S-530?
- Mark as New
- Bookmark
- Subscribe
- Mute
- Subscribe to RSS Feed
- Permalink
- Report Inappropriate Content
11-17-2023 08:18 AM - edited 11-27-2023 01:35 PM
This is a different topic.
The topic in before was that the homing procedure was using the method going over fixed stop. During the move to fixed stop it was/is using the clamping torque (S-0-0530) but after acknowledging the fixed stop it once again uses the full torque parameterized (no longer the restricted one set in S-00530). This is normal and the intended function.
This new question, to add S-0-0530 to the cyclic telegram especially for PROFINET communication, is new and is a new request we will follow.
- Mark as New
- Bookmark
- Subscribe
- Mute
- Subscribe to RSS Feed
- Permalink
- Report Inappropriate Content
11-27-2023 01:19 PM
Please be aware: Instead of using the cyclic telegram to write the parameter S-0-0530 you can write this parameter (S-0-0530) as well in the acyclic channel (PROFINET read/write record).
If you need the parameter S-0-0530 really in the cyclic telegram please address to your technical contact at Bosch Rexroth to get this requirement prioritized.