FORUM CTRLX AUTOMATION
ctrlX World Partner Apps for ctrlX AUTOMATION
Dear Community User! We will start the migration process in one hour.
The community will be then in READ ONLY mode.
Read more: Important
information on the platform change.
- ctrlX AUTOMATION Community
- Forum ctrlX AUTOMATION
- ctrlX DRIVE
- Re: S-0-0530, Clamping torque does not seem to work as intended
S-0-0530, Clamping torque does not seem to work as intended
- Subscribe to RSS Feed
- Mark Topic as New
- Mark Topic as Read
- Float this Topic for Current User
- Bookmark
- Subscribe
- Mute
- Printer Friendly Page
- Mark as New
- Bookmark
- Subscribe
- Mute
- Subscribe to RSS Feed
- Permalink
- Report Inappropriate Content
10-12-2022 12:09 PM
We are comissioning a machine that is using C1300 and C0600.
According to the manual the torques should be limited by this parameter when C1300 and C0600 is active:

But it isn't:

As you can se in the picture above, C1300 is active, S530 has the value of 25% but the actual torque is 40.1
Using firmware 03V12
Solved! Go to Solution.
- Mark as New
- Bookmark
- Subscribe
- Mute
- Subscribe to RSS Feed
- Permalink
- Report Inappropriate Content
10-12-2022 06:06 PM
Please provide parameter file in format "all parameters". It might be that due to other settings like standstill (S-0-0124) and positioning window S-0-0057 or S-0-0261) the positive stop command is not acknowledged correctly.
- Mark as New
- Bookmark
- Subscribe
- Mute
- Subscribe to RSS Feed
- Permalink
- Report Inappropriate Content
11-22-2022 03:42 PM
Any news here or can this topic be closed?
- Mark as New
- Bookmark
- Subscribe
- Mute
- Subscribe to RSS Feed
- Permalink
- Report Inappropriate Content
11-23-2022 08:19 AM
Hello Uwe,
I only have a backup parameters avaiable.
But as you see in the parameter group; the torque feedback (40.1%) is higher then the clamping torque (25.0%), and C1300 is active.
And in IndraWorks the Effective peak torque limit is 40% and not 25.0% as expected with C1300 active.
/Andreas
- Mark as New
- Bookmark
- Subscribe
- Mute
- Subscribe to RSS Feed
- Permalink
- Report Inappropriate Content
11-23-2022 08:47 AM
As said we need the parameters in format "all parameters", otherwise development cannot really have a look into this issue. Please provide this information!
- Mark as New
- Bookmark
- Subscribe
- Mute
- Subscribe to RSS Feed
- Permalink
- Report Inappropriate Content
11-25-2022 08:23 AM

- Mark as New
- Bookmark
- Subscribe
- Mute
- Subscribe to RSS Feed
- Permalink
- Report Inappropriate Content
11-02-2023 03:43 PM
Uwe,
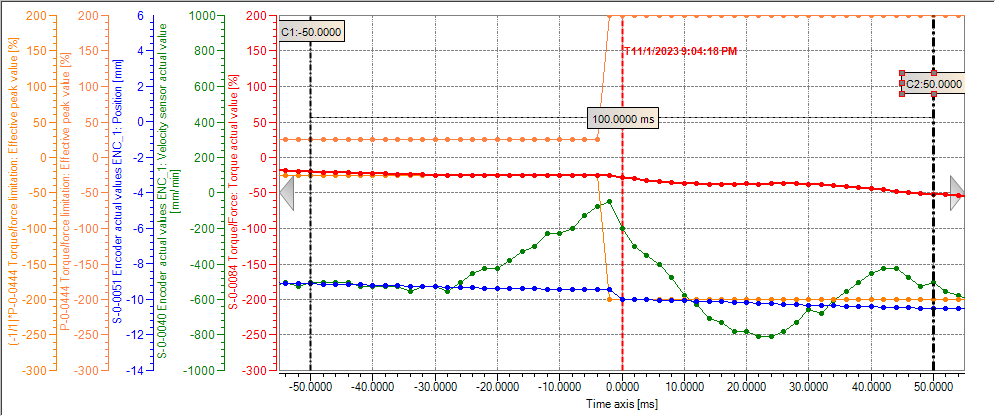
I saved a .par file with all parameters (we were doing the testing with "Ax25_PickAxisY"). I also saved an oscilloscope trace of one of the drive controlled homing that shows the issue. It looks like it is using S-0-0530 as the limit, and when the torque feedback exceeds the clamping force the axis reference is set. After the reference is set it continues to move using S-0-0092. I think the solution would be to keep using S-0-0530 as the torque limit until the "Position at reference point" move is done.
- Mark as New
- Bookmark
- Subscribe
- Mute
- Subscribe to RSS Feed
- Permalink
- Report Inappropriate Content
11-03-2023 12:44 PM
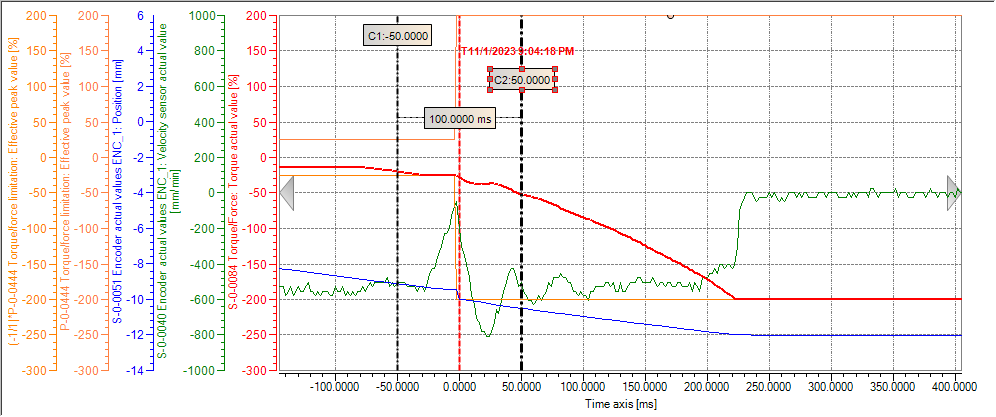
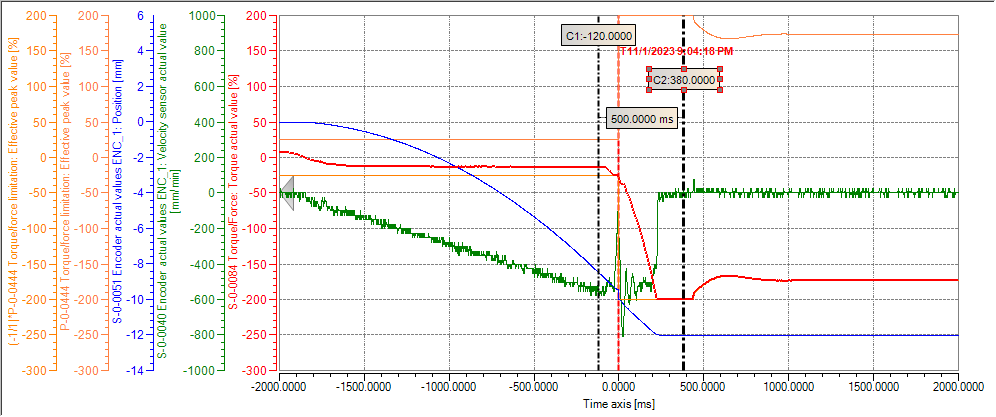
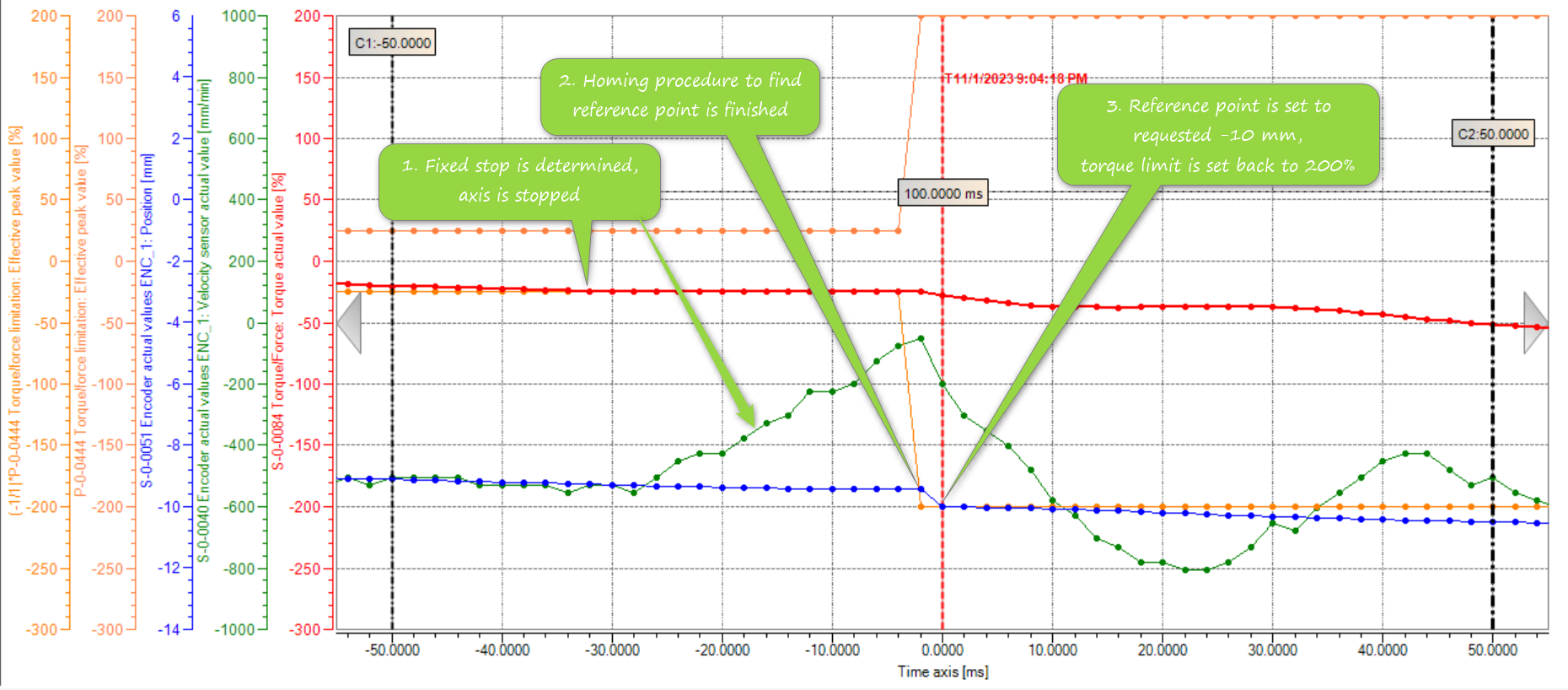
As far as I see it the procedure works as intended:
- homing takes place to get to fixed stop (restricted to clamping torque)
- reference point is set, at same time torque limit is set back to normal value (no longer the clamping torque is valid)
- position to reference point taking offset into account takes place --> in here you might set the offset or the reference point different
See evaluations in attachment.
- Mark as New
- Bookmark
- Subscribe
- Mute
- Subscribe to RSS Feed
- Permalink
- Report Inappropriate Content
11-16-2023 11:35 AM
S-0-0530.0.0 Clamping torque can't be select in mater communication :

{kind=link}
{kind=link}
{kind=link}
{kind=link}
why - is it me who has misunderstood the use of the S-530?
- Mark as New
- Bookmark
- Subscribe
- Mute
- Subscribe to RSS Feed
- Permalink
- Report Inappropriate Content
11-17-2023 08:18 AM - edited 11-27-2023 01:35 PM
This is a different topic.
The topic in before was that the homing procedure was using the method going over fixed stop. During the move to fixed stop it was/is using the clamping torque (S-0-0530) but after acknowledging the fixed stop it once again uses the full torque parameterized (no longer the restricted one set in S-00530). This is normal and the intended function.
This new question, to add S-0-0530 to the cyclic telegram especially for PROFINET communication, is new and is a new request we will follow.
- Mark as New
- Bookmark
- Subscribe
- Mute
- Subscribe to RSS Feed
- Permalink
- Report Inappropriate Content
11-27-2023 01:19 PM
Please be aware: Instead of using the cyclic telegram to write the parameter S-0-0530 you can write this parameter (S-0-0530) as well in the acyclic channel (PROFINET read/write record).
If you need the parameter S-0-0530 really in the cyclic telegram please address to your technical contact at Bosch Rexroth to get this requirement prioritized.