FORUM CTRLX AUTOMATION
ctrlX World Partner Apps for ctrlX AUTOMATION
Dear Community User! We have started the migration process.
This community is now in READ ONLY mode.
Read more: Important
information on the platform change.
- ctrlX AUTOMATION Community
- Forum ctrlX AUTOMATION
- ctrlX DRIVE
- Betreff: F2037 Excessive position command difference error over a certain speed.
F2037 Excessive position command difference error over a certain speed.
- Subscribe to RSS Feed
- Mark Topic as New
- Mark Topic as Read
- Float this Topic for Current User
- Bookmark
- Subscribe
- Mute
- Printer Friendly Page
- Mark as New
- Bookmark
- Subscribe
- Mute
- Subscribe to RSS Feed
- Permalink
- Report Inappropriate Content
09-19-2023 10:20 AM
Hi,
I'm trying program a system which contains the following items:
ctrlX Core X3: 1.20
Motion App: 1.20
PLC App: 1:20
HMS01 Single axis inveter
I'm using the CXA_MotionInterface. I can start the drive as needed, but after a certain speed 2000rpm to be exact, the drive stops with F2037 Excessive position command difference error. Under that speed everithing works fine. I tried to change the S-0-0091 parameter of the drive to a higher value as the help suggest but nothing works for me.
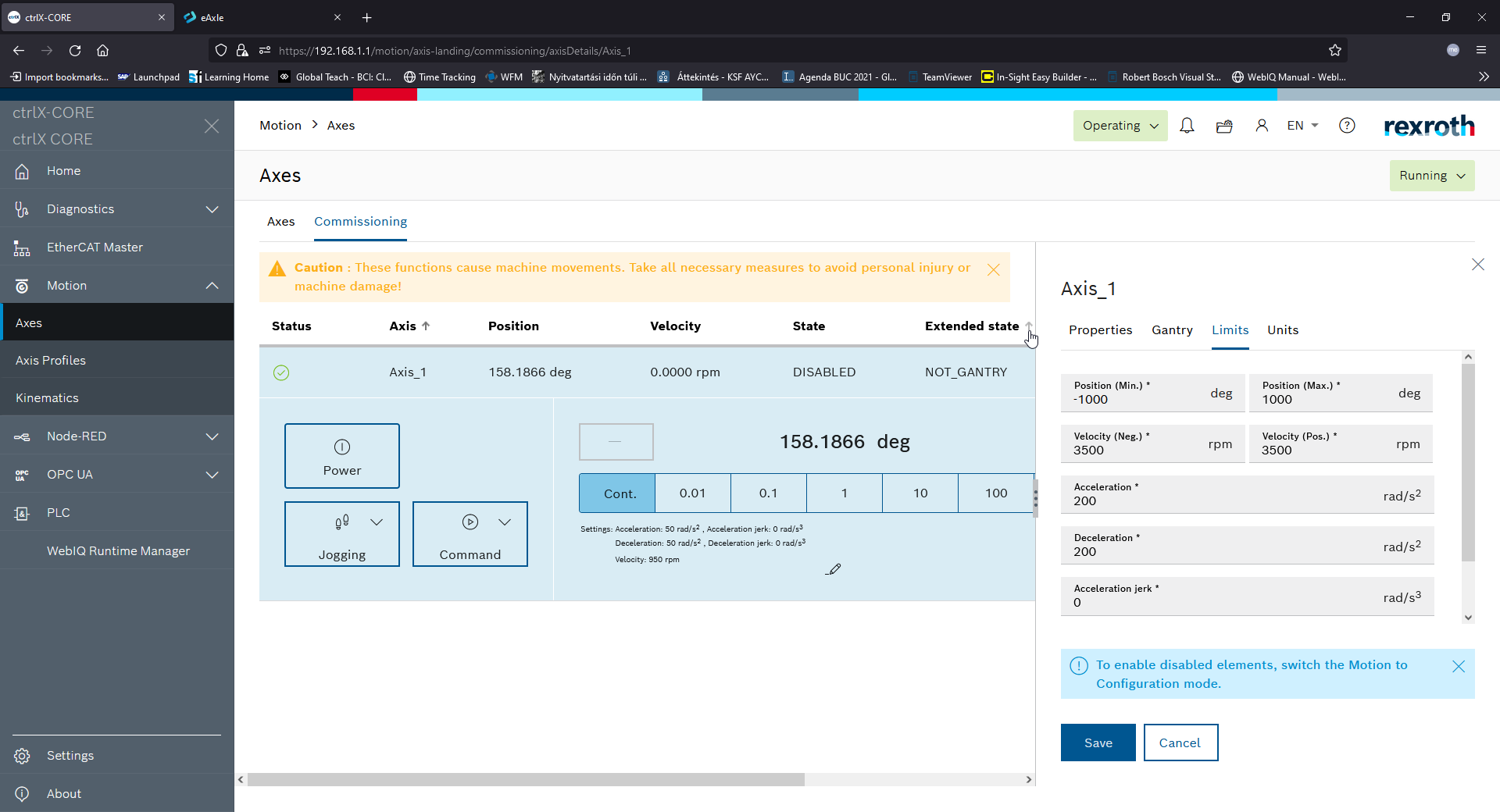
I checked all the limit values in drive engineering and also Motion app. Everywhere I have higher values than 2000 rpm. (see the attached photos).
I also uploaded the drive parameters.
Any help would be appreciate
Thanks, Csaba
Solved! Go to Solution.
- Mark as New
- Bookmark
- Subscribe
- Mute
- Subscribe to RSS Feed
- Permalink
- Report Inappropriate Content
09-20-2023 08:54 AM
Hello Csaba,
did you also check the acceleration bipolar limit S-138 ? Maybe here is the limit ?

Regards, Stefan
- Mark as New
- Bookmark
- Subscribe
- Mute
- Subscribe to RSS Feed
- Permalink
- Report Inappropriate Content
09-21-2023 06:04 PM
Please have a look to parameters P-0-0010 and P-0-0011 in the error case F2037

My guess is that on the control system you have not chosen modulo scaling whereas on the drive side it is chosen. See:

Note: Normally it is recommended to set the maximum travel range to the same value as the modulo value. So in here instead of 5000° you should enter 360° as well.
That - inconsistency of scaling in between drive and control - may explain why it is going wrong.
- Mark as New
- Bookmark
- Subscribe
- Mute
- Subscribe to RSS Feed
- Permalink
- Report Inappropriate Content
09-22-2023 11:23 AM
Hi,
Thanks for your answer, but I use way smaller acceleration and deceleration.
- Mark as New
- Bookmark
- Subscribe
- Mute
- Subscribe to RSS Feed
- Permalink
- Report Inappropriate Content
09-22-2023 11:25 AM
Hi,
Thanks for your reply, I can try this next week. I will give a feedback as soon as possible.
- Mark as New
- Bookmark
- Subscribe
- Mute
- Subscribe to RSS Feed
- Permalink
- Report Inappropriate Content
10-18-2023 12:07 PM
Are there any news or can this topic be closed?
- Mark as New
- Bookmark
- Subscribe
- Mute
- Subscribe to RSS Feed
- Permalink
- Report Inappropriate Content
11-24-2023 11:24 AM
Sorry for a really late response, but I could not do any test until now. Somehow I was look over the most obvious parameter. (red arrow)
Thanks for all of your help!

{kind=link}
{kind=link}
{kind=link}
{kind=link}