FORUM CTRLX AUTOMATION
ctrlX World Partner Apps for ctrlX AUTOMATION
Dear Community User! We are updating our platform to a new
system.
Read more: Important
information on the platform change.
- ctrlX AUTOMATION Community
- ctrlX World Partner Apps for ctrlX AUTOMATION
- CODESYS - PLC Add-ons
- Softmotion Robot MC_GroupEnable does not work
Softmotion Robot MC_GroupEnable does not work
- Subscribe to RSS Feed
- Mark Topic as New
- Mark Topic as Read
- Float this Topic for Current User
- Bookmark
- Subscribe
- Mute
- Printer Friendly Page
- Mark as New
- Bookmark
- Subscribe
- Mute
- Subscribe to RSS Feed
- Permalink
- Report Inappropriate Content
05-13-2022 12:26 PM
Hello,
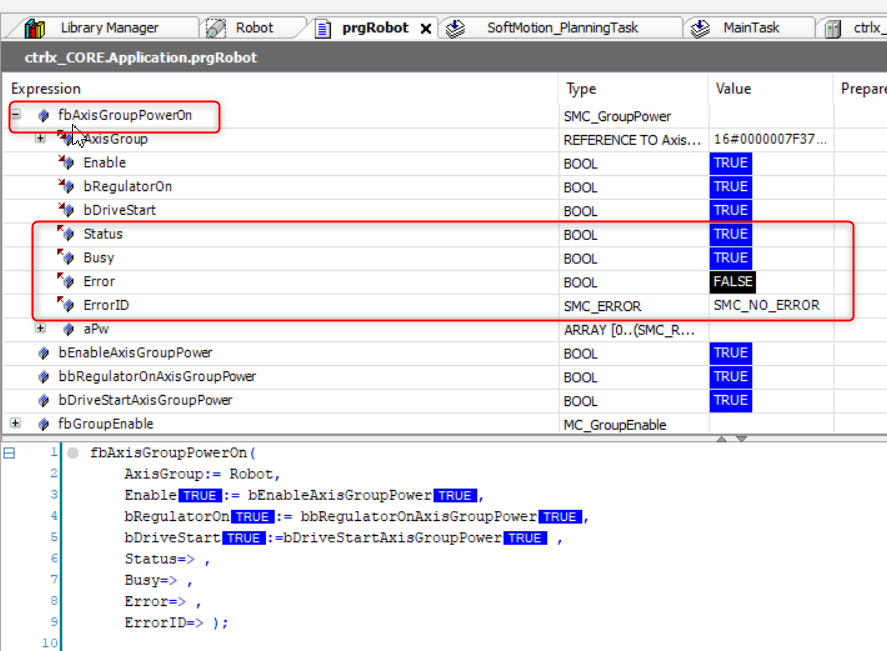
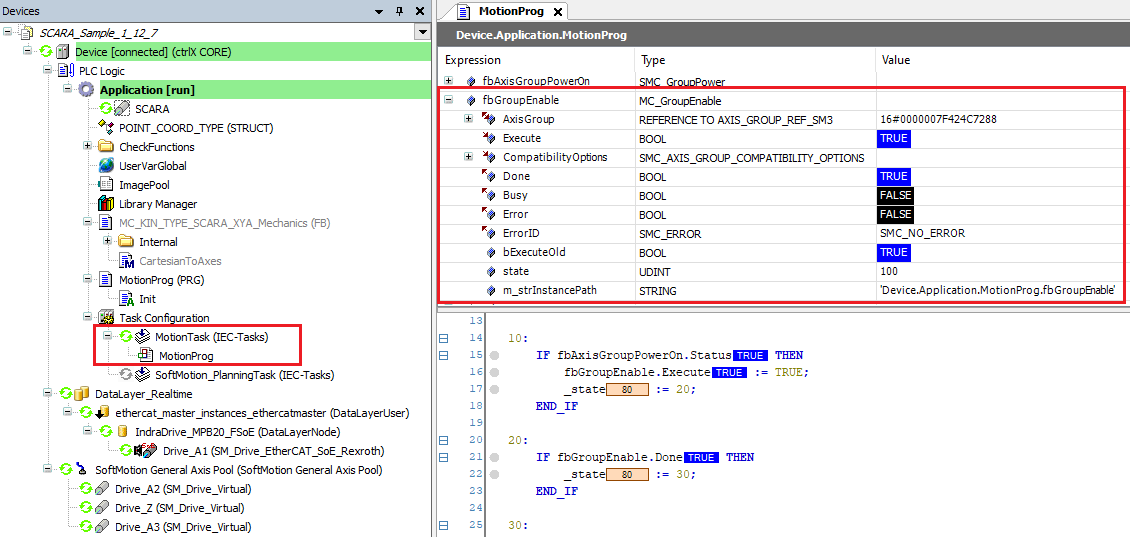
I'm tryning to use the Codesys Softmotion robot functionality but I could not be able to enable the kinematic group using the MC_GroupEnable function block.
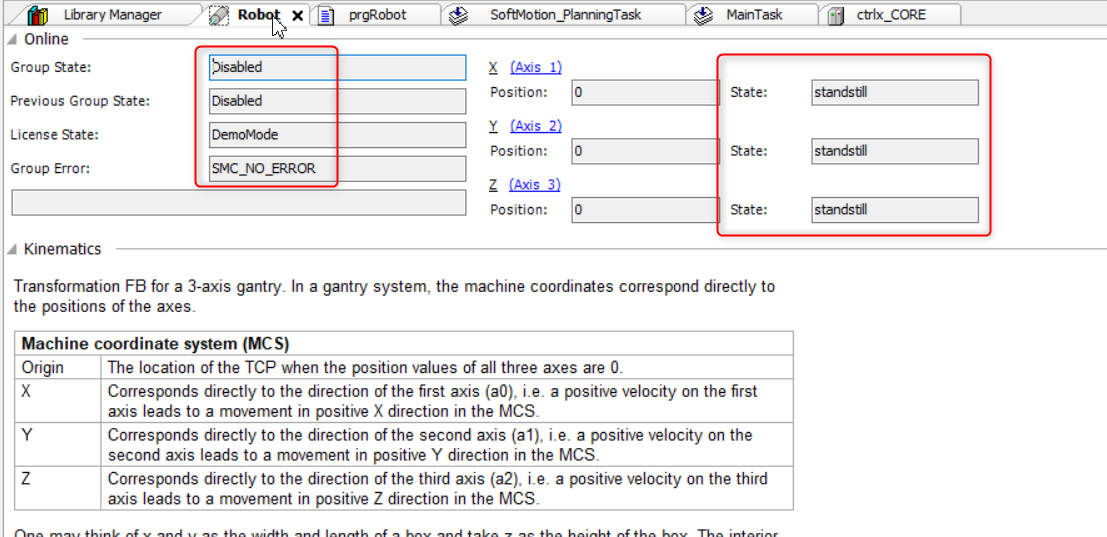
The kinematic axis power on works properly but when I try to group the axis the function block stay in "Busy" state with no errors but the axis do not group in the kinematic.
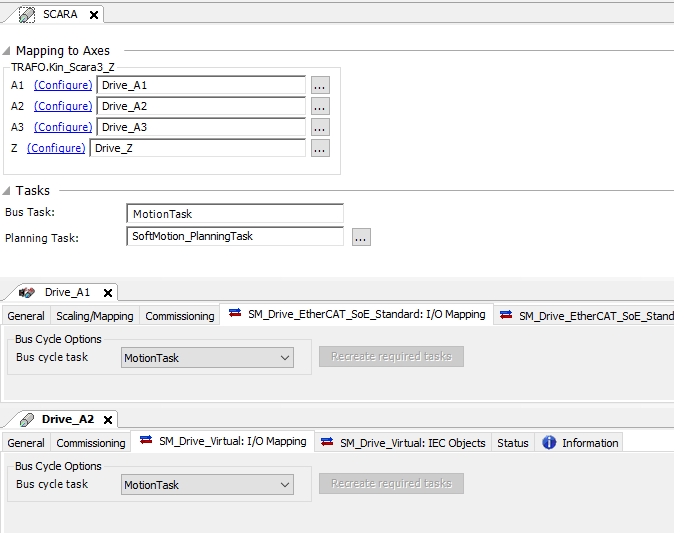
You can see how I configurate the system and the FB status in the attached screenshots.
Please could you help me to understand where is the problem ?
Many Thanks
P.S.: I do not have the Codesys Softmotion App lincence so I'm working withe the 30 minutes fren trial but I the other library functions ( like cam synchronization for instance ) are working well during the trial time
Giuseppe
Solved! Go to Solution.
- Mark as New
- Bookmark
- Subscribe
- Mute
- Subscribe to RSS Feed
- Permalink
- Report Inappropriate Content
05-16-2022 07:38 PM
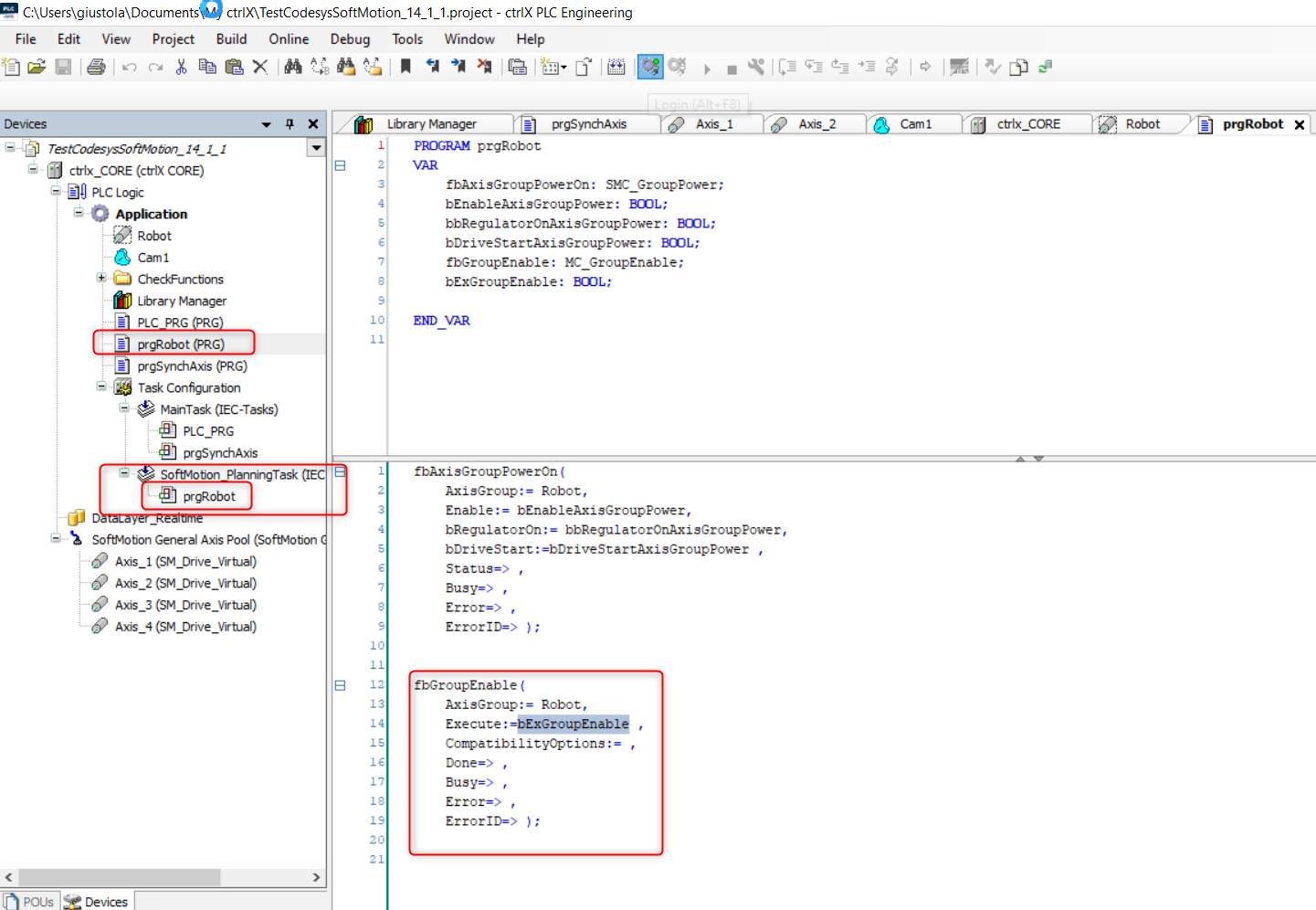
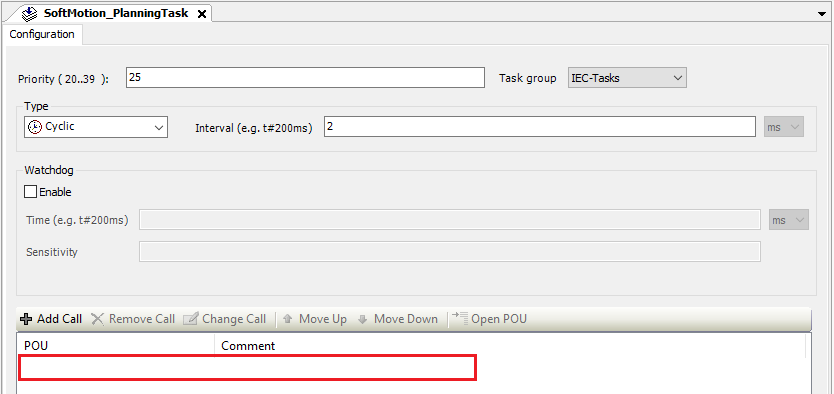
I believe MC_GroupEnable must be called in the Bus Cycle Task. The task configuration I use, which after many hours of testing appears to be working, is shown in the attached files.
@CODESYS: Is documenation describing SoftMotion_PlanningTask available? What exactly is happening in this task and is it sufficient to configure it as a cycle task?
- Mark as New
- Bookmark
- Subscribe
- Mute
- Subscribe to RSS Feed
- Permalink
- Report Inappropriate Content
05-17-2022 09:41 AM - edited 05-17-2022 09:41 AM
Hello,
you were right. I called the MC_GroupEnable in the Bus Cycle Task and it worked well.
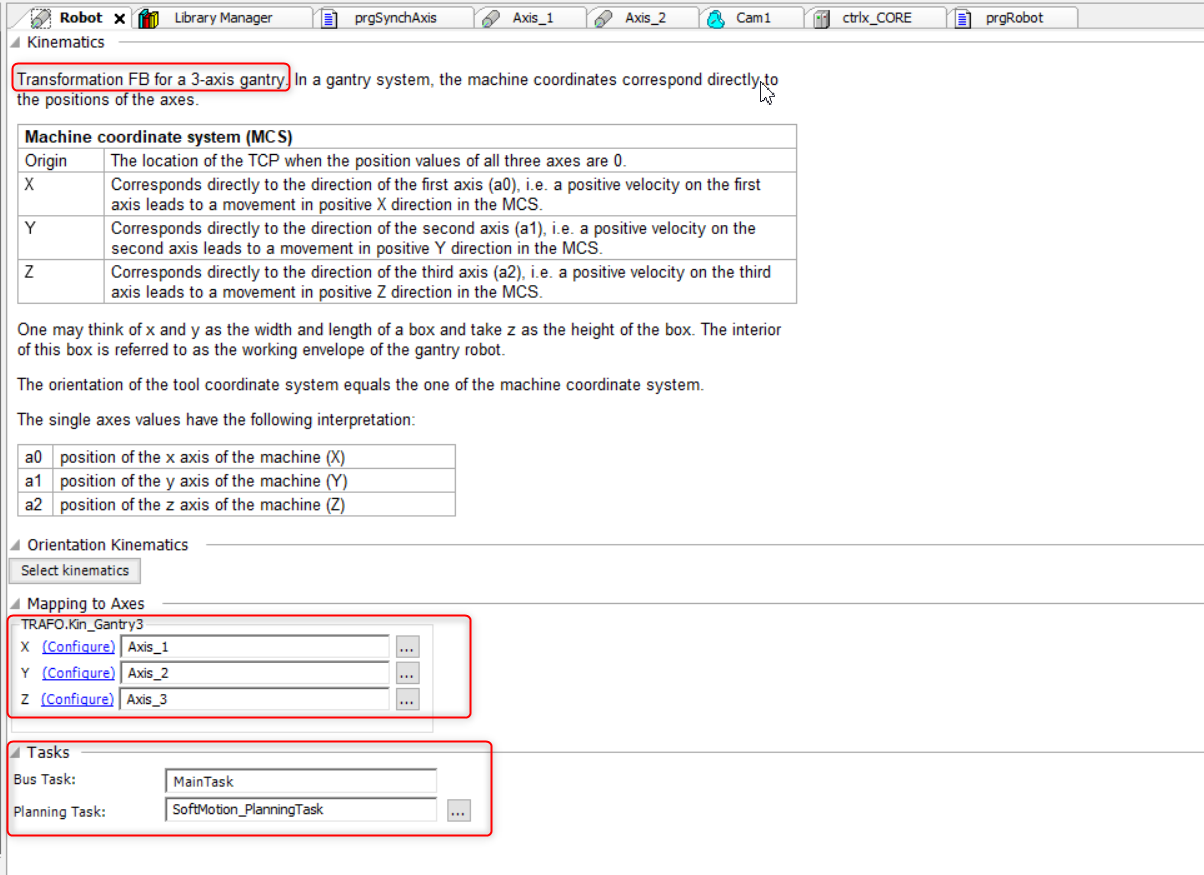
But at this point what the SoftMotion_PlanningTask stand for since it is automatically generated when you create a kinematic group?
Many thanks for your help
Giuseppe
- Mark as New
- Bookmark
- Subscribe
- Mute
- Subscribe to RSS Feed
- Permalink
- Report Inappropriate Content
05-17-2022 12:38 PM
The CODESYS documentation describes SoftMotion_PlanningTask as being required for CP (continuous path) motion, but doesn't give many details. Interestingly, the documentation recommends that it be configured as "freewheeling", which differs from the default configuration ("cyclic").

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
- Mark as New
- Bookmark
- Subscribe
- Mute
- Subscribe to RSS Feed
- Permalink
- Report Inappropriate Content
02-08-2023 03:13 PM
Many thanks,
I also encountered an Exception issue when I added an additionnal Task (cyclic - 10ms) once I I've started to run a robot with Motion queue buffering.
By changing SoftMotion_PlanningTask to Freewheeling, this problem has disapeared.