FORUM CTRLX AUTOMATION
ctrlX World Partner Apps for ctrlX AUTOMATION
Dear Community User! We have started the migration process.
This community is now in READ ONLY mode.
Read more: Important
information on the platform change.
- ctrlX AUTOMATION Community
- Forum ctrlX AUTOMATION
- ctrlX PLC
- Re: Accessing drive parameters from PLC Engineering software
Accessing drive parameters from PLC Engineering software
- Subscribe to RSS Feed
- Mark Topic as New
- Mark Topic as Read
- Float this Topic for Current User
- Bookmark
- Subscribe
- Mute
- Printer Friendly Page
- Mark as New
- Bookmark
- Subscribe
- Mute
- Subscribe to RSS Feed
- Permalink
- Report Inappropriate Content
05-23-2024 08:42 AM
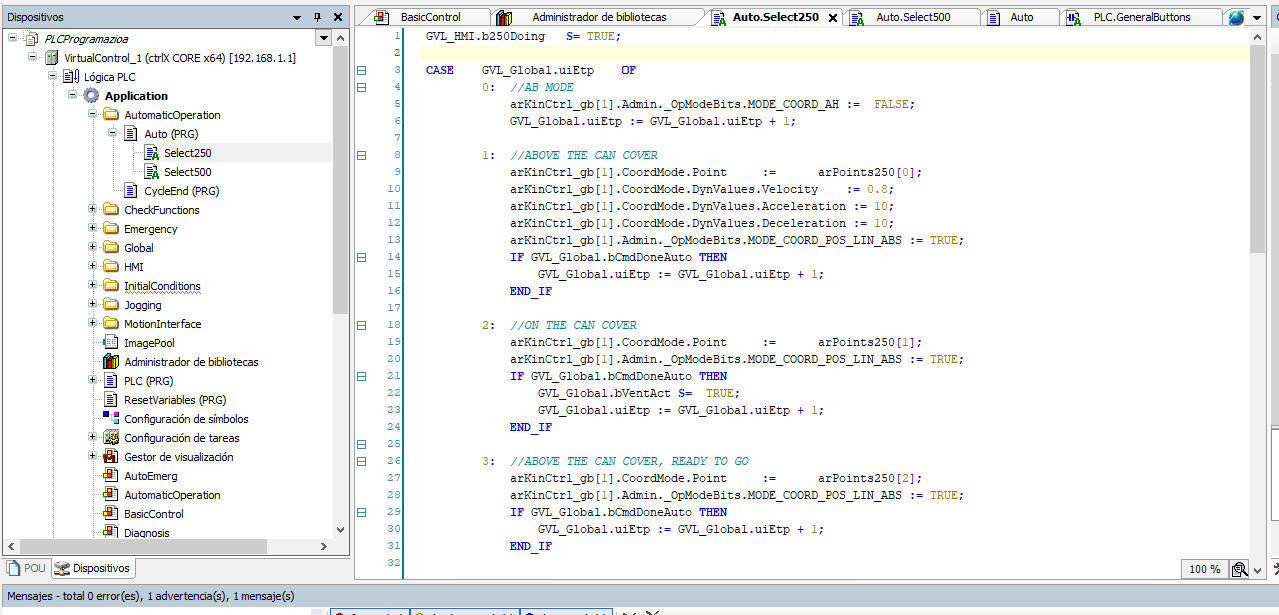
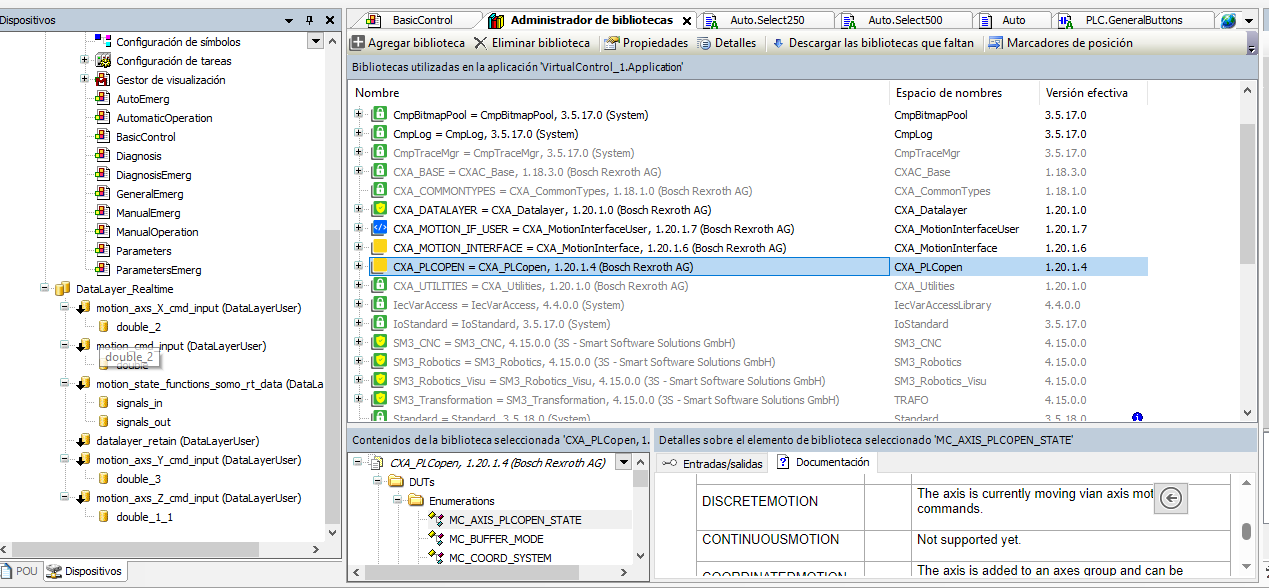
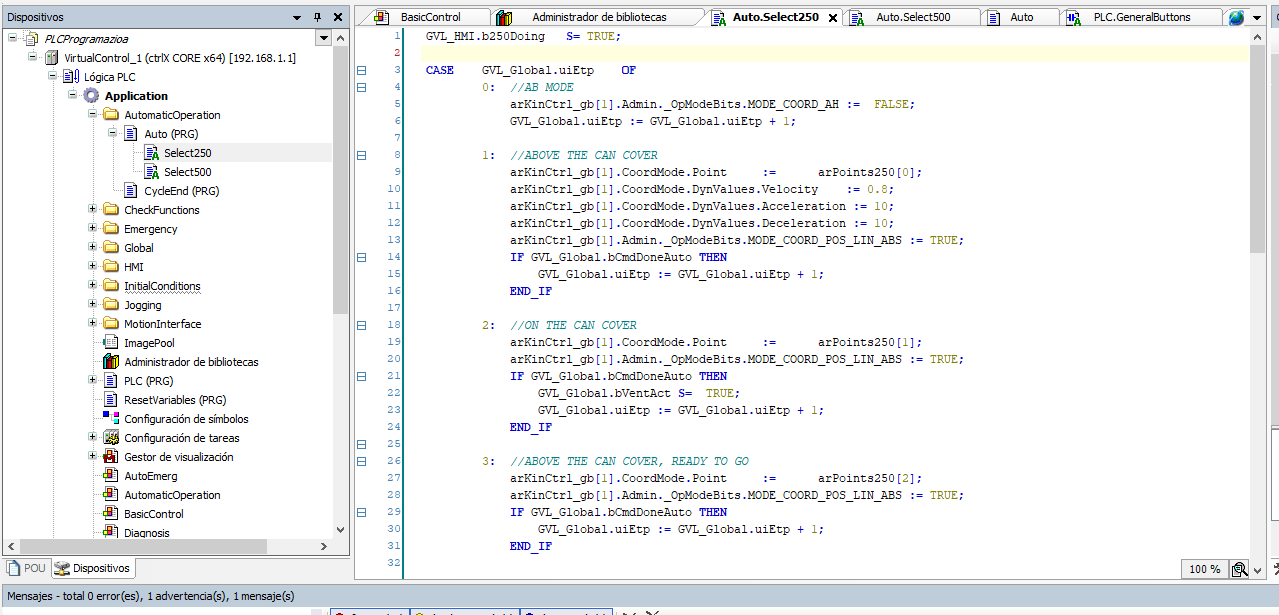
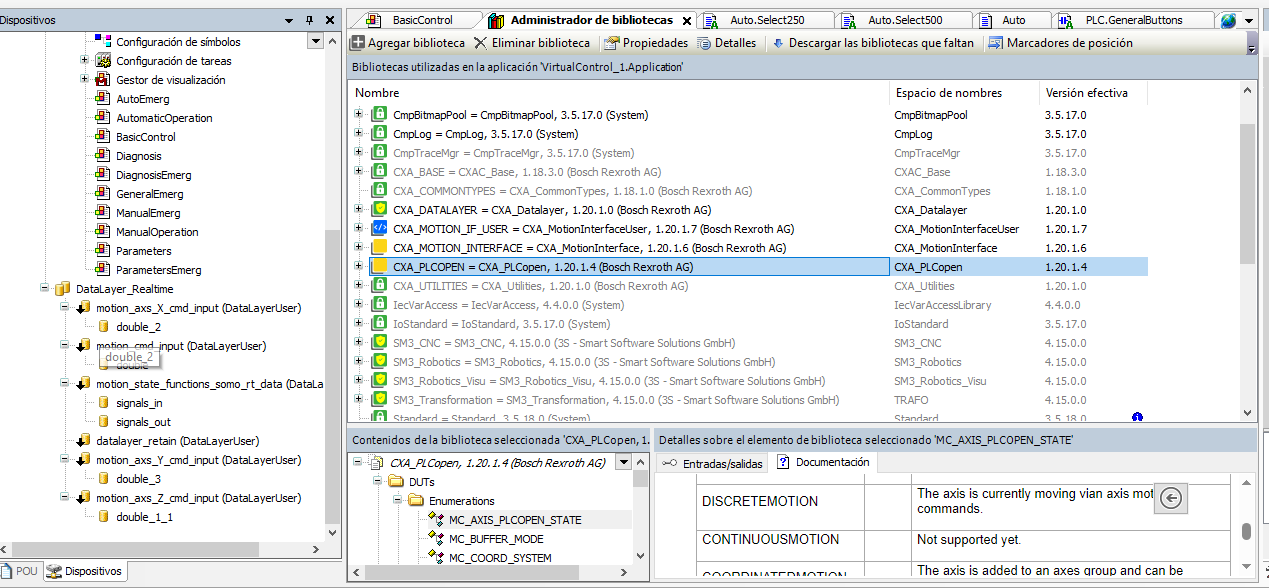
I have created three virtual axes and I am trying to access their parameters from the PLC Engineering software. To do this, I have tried using the CXA_DATALAYER and CXA_PLCOPEN libraries, but the MB_ReadParameter function does not appear. How can I do this?
Solved! Go to Solution.
- Mark as New
- Bookmark
- Subscribe
- Mute
- Subscribe to RSS Feed
- Permalink
- Report Inappropriate Content
05-23-2024 09:02 AM - edited 05-23-2024 09:03 AM
Please always add full screen sceenshots so we get a better overview.
What exactly do you mean by "but the MB_ReadParameter function does not appear"?
Virtual axes do not have Servodrive (SoE) or CAN (CoE) parameter at all.
You can use the CXA_EtherCatMaster library for accessing drive parameter directly.
- Mark as New
- Bookmark
- Subscribe
- Mute
- Subscribe to RSS Feed
- Permalink
- Report Inappropriate Content
05-23-2024 09:35 AM
Thank you for your reply.
I understand that virtual axes do not have Servodrive (SoE) or CAN (CoE) parameters, and that the CXA_EtherCatMaster library should be used for accessing drive parameters directly.
In my case, I am working on my final degree project, and I have created a VirtualCORE with three virtual axes within it. I am currently programming the operation of these axes using PLC Engineering. I would like to check that the axes are referenced for the initial conditions program.
For this reason, I am trying to find out how to access the parameters of the virtual axes (if possible), since I would like to access the parameter S-0-0403.0.0.
However, from your response, I understand that this may not be possible. If so, is there any other way to know if the axis is referenced? (Although I imagine that since it is a virtual axis, it will always be referenced, I would like to be able to include the referenced check in the initial conditions program, as would be done with a real axis).
I would appreciate any guidance you can provide on this matter.
- Mark as New
- Bookmark
- Subscribe
- Mute
- Subscribe to RSS Feed
- Permalink
- Report Inappropriate Content
05-23-2024 10:11 AM
Thank you for your reply.
I understand that virtual axes do not have Servodrive (SoE) or CAN (CoE) parameters, and that the CXA_EtherCatMaster library should be used for accesing drive parameters directly.
In my case, I have created a VirtualCORE with three virtual axes within it. I am currently programming the operation of these axes using PLC Engineering. I would like to check that the axes are referenced for the initial conditions program.
For this reason, I am trying to find out how to access the parameters of the virtual axes (if possible), since I would like to access the parameter S00403.0.0.
However, from your response, I understand that this may not be possible. If so, is there any other way to know if the axis is referenced? (Although I imagine that since it is a virtual axis, it will always be referenced, I would like to be able to include the referenced check in the initial conditions program, as would be done with a real axis).
I would appreciate any guidance you can provide on this matter.
- Mark as New
- Bookmark
- Subscribe
- Mute
- Subscribe to RSS Feed
- Permalink
- Report Inappropriate Content
05-24-2024 06:41 PM
short additonal information:
We are currently working at a Datalayer struct which displays some drive data automatically. This you can use for your PLC sequence. At the screenshot you see the availalbe drive data, e.g. the homing status you want to check. This will be availalbe for version 2.6.
All other drive information you have to use FB of the CXA_DATALAYER, as you mentioned. And you have to make a selector if you have connected "real" drives or not.
By the way if you use our recommended motion interface you will have the data directly inside the PLC, and can use it very comfortable. ( see second screenshot)
note: the screenshot shows a virtual axis. you see here the reference status = FALSE. It is still a bug and will be corrected soon. So virtual axis should always homed...


{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
- Mark as New
- Bookmark
- Subscribe
- Mute
- Subscribe to RSS Feed
- Permalink
- Report Inappropriate Content
05-27-2024 01:44 PM
Thank you for the detailed explanation and guidance. I'll explore these options in my PLC program.
In my current setup using CXA_MOTION_IF_USER library version 10.20.1.7, I'm unable to see the DeviceStatus within arAxisStatus_gb[1].Data. I'll download the recommended version to see if this resolves the issue.
Thank you for your valuable assistance!