FORUM CTRLX AUTOMATION
ctrlX World Partner Apps for ctrlX AUTOMATION
Dear Community User! We have started the migration process.
This community is now in READ ONLY mode.
Read more: Important
information on the platform change.
- ctrlX AUTOMATION Community
- Forum ctrlX AUTOMATION
- ctrlX CORE
- Smart function kit for handling PLC communication
Smart function kit for handling PLC communication
- Subscribe to RSS Feed
- Mark Topic as New
- Mark Topic as Read
- Float this Topic for Current User
- Bookmark
- Subscribe
- Mute
- Printer Friendly Page
- Mark as New
- Bookmark
- Subscribe
- Mute
- Subscribe to RSS Feed
- Permalink
- Report Inappropriate Content
01-26-2023 04:24 PM
Hello!
I wonder, what is the way to communicate SFKH with PLC was planned by developers of this product?
I try to communicate through DataLayer, but I can't even acknowledge error using smartfunctionkit/communication/cmd/clearerror command.
After I acknowledge emergency stop or STO signal, system asks for drives to be enables, if I enable drives via motion/axs/Axis_1/cmd/power command, system asks for kinematics to be enabled, if I enable it in motion/kin/Robot/cmd/group-ena then I have no errors in HMI, but system doesn't move axis. When I execute any movement in the SFKH programm, it goes through without movement and with no error.
I use smart function kit app 2.1.1, PLC app ver 1.12.5, motion app 1.12.7.
Could someone help me? Thank you!
Solved! Go to Solution.
- Mark as New
- Bookmark
- Subscribe
- Mute
- Subscribe to RSS Feed
- Permalink
- Report Inappropriate Content
01-27-2023 08:50 AM - edited 01-27-2023 08:51 AM
Hi,
I also used a PLC to communicate with the SFK. In my case I used the DL_Write_Node out of the CXA_Datalayer Library in PLC.

I used the following code to write to the nodes of the DL:
In my case, both the execution commands as well as the clear error function worked fine,

I hope this helps.
- Mark as New
- Bookmark
- Subscribe
- Mute
- Subscribe to RSS Feed
- Permalink
- Report Inappropriate Content
01-27-2023 10:14 AM
Dear Luschuerz,
thank you for your answer!
In my case, after "clearerror" I have the following state of SFKH and it doesn't change if I clear error again:

- Mark as New
- Bookmark
- Subscribe
- Mute
- Subscribe to RSS Feed
- Permalink
- Report Inappropriate Content
01-27-2023 11:36 AM
Hi ,
could you please view the pending diagnosis and/or motion-state by the web-UI. The Axisprofile connection between motion and drive is setup correctly?
Can you try to move the Kinematik or Axis by the commisioning-dialog of the Web-UI ?
Please return with some UI-screenhots.
Hope that helps - bye
- Mark as New
- Bookmark
- Subscribe
- Mute
- Subscribe to RSS Feed
- Permalink
- Report Inappropriate Content
01-27-2023 11:52 AM
Everything works fine if I acknowledge error with HMI button in SFKH app. Then I have errors pending, but system is operating, power of axes is on, movements are executed.
the errors are:

If I acknowledge with /clearerror DataLayer, the state of the axes is following:

I hope it's what you've asked. Thank you for support!
- Mark as New
- Bookmark
- Subscribe
- Mute
- Subscribe to RSS Feed
- Permalink
- Report Inappropriate Content
01-27-2023 01:48 PM
Hello,
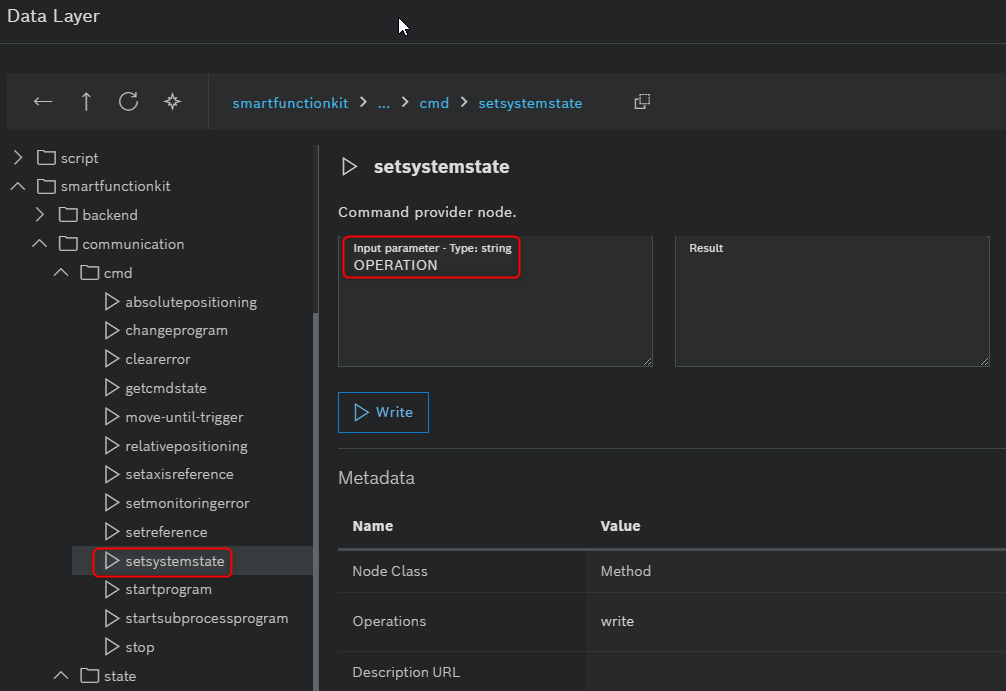
the clear-error command is just clearing all errors. To change the system state back in normal operation mode (drives, kinematic and motion = ready) you have to execute the setsystemstate cmd (attached in the picture):
path: smartfunctionkit/communication/cmd/setsystemstate
input as string: "OPERATION"
That should bring your system back to operation state.
{kind=link}
- Mark as New
- Bookmark
- Subscribe
- Mute
- Subscribe to RSS Feed
- Permalink
- Report Inappropriate Content
01-27-2023 02:29 PM
Thank you very much, it works now!
Could you advice me where can I find documentation describing this commands?
- Mark as New
- Bookmark
- Subscribe
- Mute
- Subscribe to RSS Feed
- Permalink
- Report Inappropriate Content
01-27-2023 03:20 PM
Perfectly 🙂
there is a german documentation on the rexroth web page: https://www.boschrexroth.com/de/de/media-details/baa2c1ca-3abc-4e6a-94f5-febaffb8cc06