
- Subscribe to RSS Feed
- Mark as New
- Mark as Read
- Bookmark
- Subscribe
- Printer Friendly Page
- Report Inappropriate Content
In the following we show to you how to use sensorless deceleration in the case of encoder error at ctrlX DRIVE.
Versions used
All the functions and screen shots are based on:
- ctrlX DRIVE Engineering version 01V20
- Runtime / Firmware version of drive AXS-V0314
Prerequisites
A connection to the ctrlX DRIVE has been successfully establi-shed, the device is correctly wired and 24 V are successfully put on. As well the engineering tool ctrlX DRIVE Engineering has been started.
1. What the function is good for
The function allows a proper and fast error reaction of a moving axis in the case of an encoder failure (error code F8022).
It
- switches the operation mode to open loop control (regulation w/o encoder)
- and starts a controlled deceleration to standstill with the deceleration specified in the “drive halt” function.
In this way in such an encoder error situation in a lot of application
- a holding brake or holding brake device to protect
- hitting and harming the mechanical end limits or
- hitting and harming workpieces or objects on the travel path
is no longer needed
and/or
- the transmission elements like gear boxes or couplings are protected from overload conditions due to
- sudden clamping of holding brake devices.
Mind that the function is normally not to be used in safe motion applications to prevent personnel hazards.
2. Prerequisite for using the “Sensorless deceleration in the case of encoder error” function
In order to activate the function the so-called productivity package must be present. It should normally already be ordered correctly or, if not ordered, be licensed afterwards by “Import license”.
The “Sensorless deceleration in the case of encoder error” function itself then needs to be selected and activated by a “Reboot”.

Fig. 1.: Productivity package with activated function “Sensorless deceleration in the case of encoder error”
3. Configure parameters
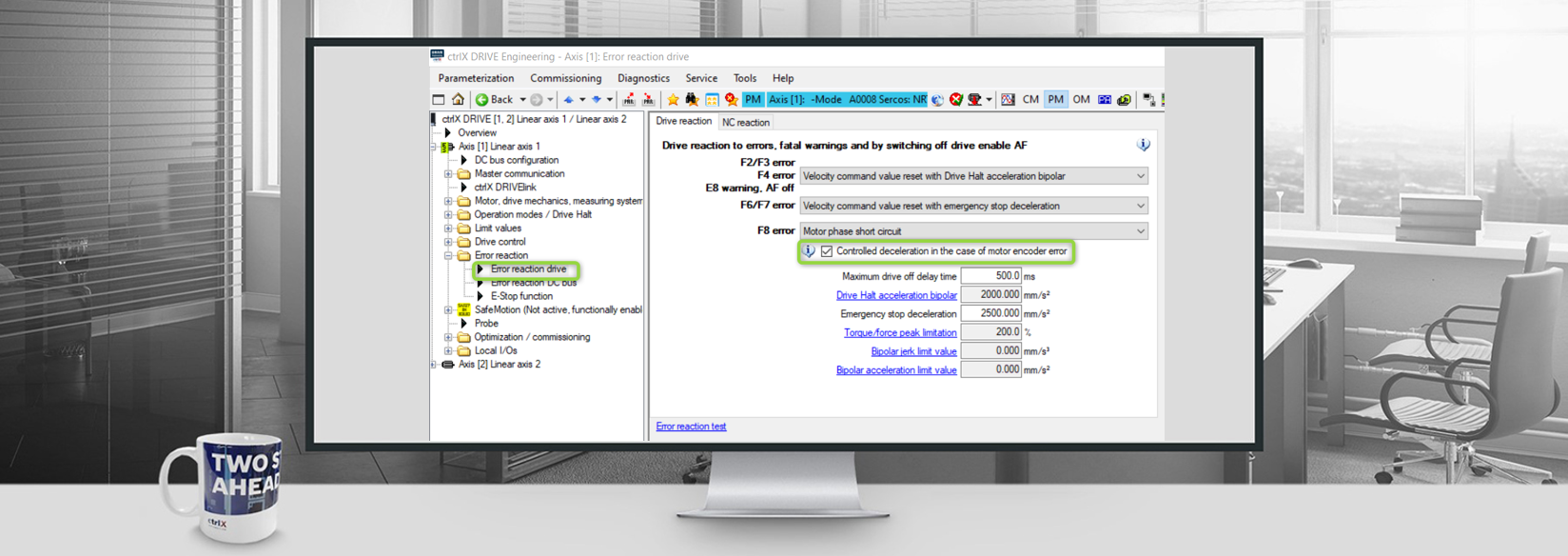
The “Sensorless deceleration in the case of encoder error” is activated by
- setting the check box for the function in case of F8 errors.

Fig. 2.: Configuration for “Sensorless deceleration in the case of encoder error”
In order to check the parameters and function itself it is recommended to commission the SVC control for encoderless standstill in case of encoder error. Activate the checkbox!

Fig. 3.: Configuration for commissioning “Sensorless deceleration in the case of encoder error”
Now you may access the parameters for the sensorless vector control (SVC).

Fig. 4.: Configuration for commissioning “Sensorless deceleration in the case of encoder error”
The proper functioning of the SVC control should be checked. In here we got the following behavior.

Fig. 5.: Test of “Sensorless Vector Control” (SVC) in normal condition
The Drive Halt function should be parameterized according to the needs of the application.

Fig. 6.: Drive Halt settings
4. Check proper function
The error reaction may be tested with the help of the “Error reaction test” which allows to set the trigger. In here the “F8098 F8 test error, F8022 error reaction” is selected in the menu.

Fig. 7.: Test of the function “Sensorless deceleration in the case of encoder error”
Now the trigger of the error reaction can be set. Best is to trigger the button if the movement is on full velocity.

Fig. 8.: Trigger the test of the function “Sensorless deceleration in the case of encoder error”
If set properly one may get the following behavior.

Fig. 9.: “Sensorless deceleration in the case of encoder error”
In here in this example moving on speed 40 m/min the distance, the axis is still moving, is 23,47 mm. The deceleration is nearly getting to 16 m/s2 like parameterized as 20 m/s2.
If compared to the normal behavior in normal F2 error case (without encoder error) this is quite o.k., see:

Fig. 10.: Deceleration in the case of a normal F2 error
In here in this example moving on speed 40 m/min the distance, the axis is still moving, is 12,52 mm. The deceleration is slightly exceeding the parameterized 20 m/s2.
As well if compared to the behavior in F8022 error case (with encoder error) and setting the error reaction “torque disable” the reaction is quite o.k., see:

Fig. 11.: Deceleration in the case of a F8022 error with error reaction “torque disable”
In here in this example moving on speed 40 m/min the distance, the axis is still moving, is 72,48 mm, so nearly 3 times the value of the sensorless deceleration in case of encoder error.
