
- Subscribe to RSS Feed
- Mark as New
- Mark as Read
- Bookmark
- Subscribe
- Printer Friendly Page
- Report Inappropriate Content
Mind that in the attachment you find a zipped step-by-step description of the following procedure.
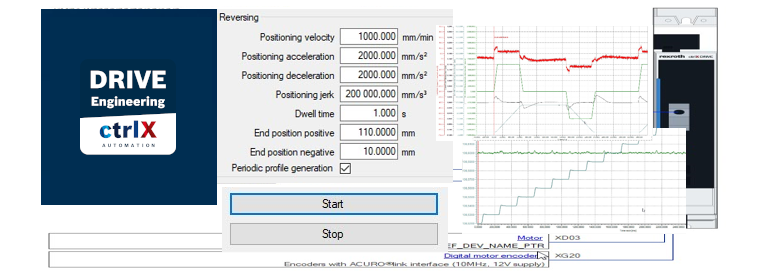
1. Set Reversing moving mode:
If setting "Travel mode" on "Reversing" one can execute a full jerk limited positioning from point a to point B. Key in correct values for speed acceleration, deceleration and jerk and set the end positions. As well the "Periodic pofile generation" is recommended.

After pressing the button "Start" the movement is started.

To change settings of the movements like e.g. to increase the speed, you have to stop the movement first, change the settings and start again.

2. Check reverse movement by taking scope readings:
You may now check the behavior by using the oscilloscope.
Select the recommended signals.

Configure the measurement resolution.

Configure as well the trigger conditions.

Now start the measurement and the scope will look like this. You can adjust the scaling like outlined in the documentation.

3. Set Stepper moving mode:
The Easy startup mode allows as well the function to keep in stepper mode. See example for proper settings.

4. Check stepper movement by taking scope readings:
The relevant scope readings will look like this.

