FORUM CTRLX AUTOMATION
ctrlX World Partner Apps for ctrlX AUTOMATION
Dear Community User! We are updating our platform to a new
system.
Read more: Important
information on the platform change.
- ctrlX AUTOMATION Community
- Forum ctrlX AUTOMATION
- ctrlX MOTION
- Asynchronous motor without Encoder with Motion APP
Asynchronous motor without Encoder with Motion APP
- Subscribe to RSS Feed
- Mark Topic as New
- Mark Topic as Read
- Float this Topic for Current User
- Bookmark
- Subscribe
- Mute
- Printer Friendly Page
- Mark as New
- Bookmark
- Subscribe
- Mute
- Subscribe to RSS Feed
- Permalink
- Report Inappropriate Content
04-03-2023 11:20 AM
Hello,
we are trying to run a asynchrunous motor without a Encoder on a XMS2-W0016ANN and a ctrlX CORE wiht Motion App 1.18.2 via SoE.
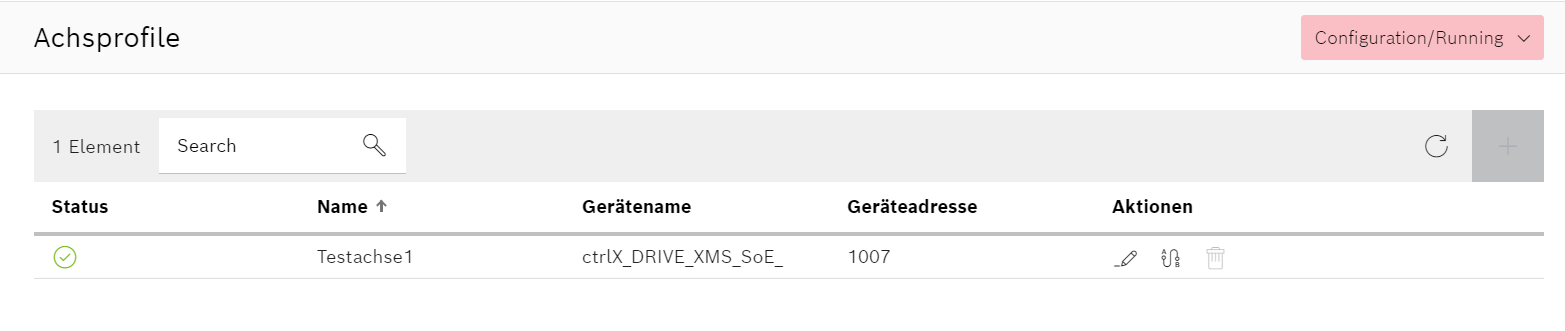
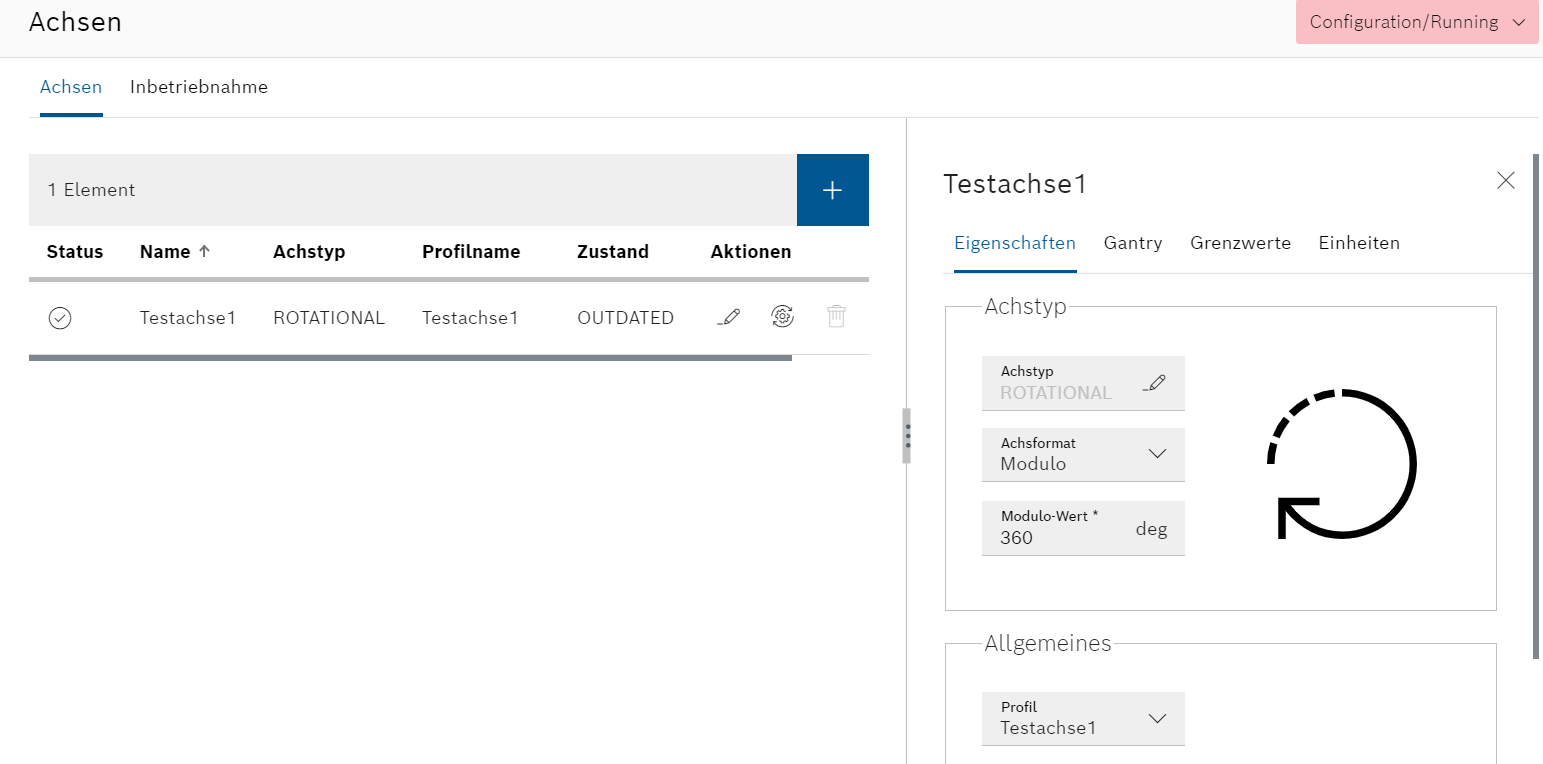
We configured the axis and the axisprofile, linked them and set the EtherCAT Adress (see Screenshots).
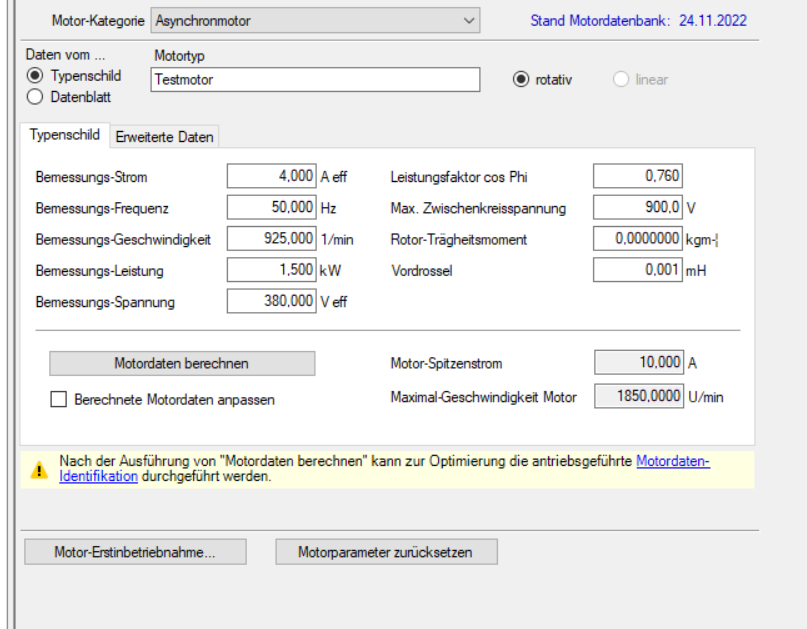
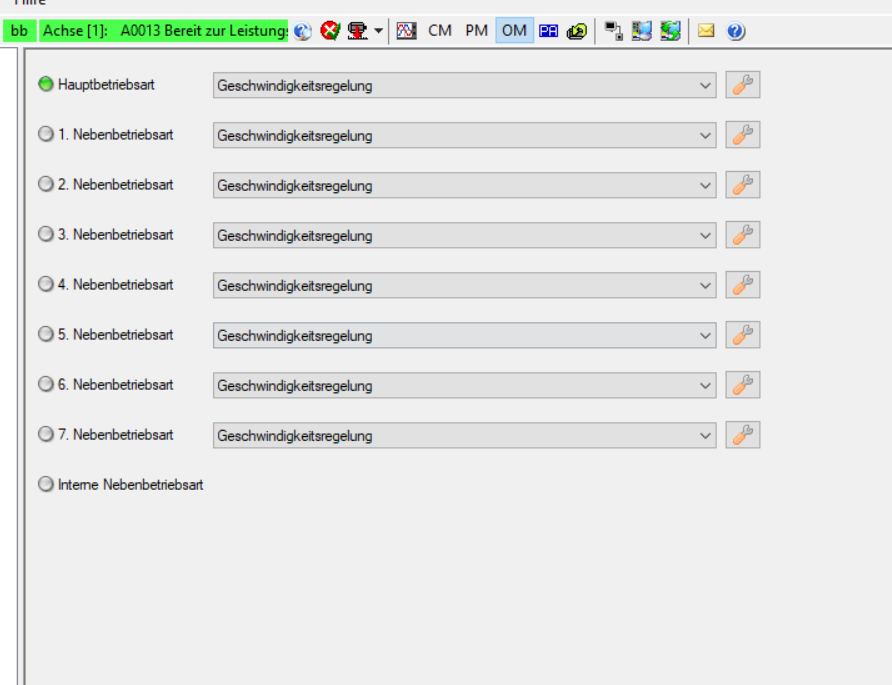
In the Drive engineering we set up a Asynchronous Motor without encoder and set all operation Modes to "Velocitycontrol" (no other Modes are available with this configuration).
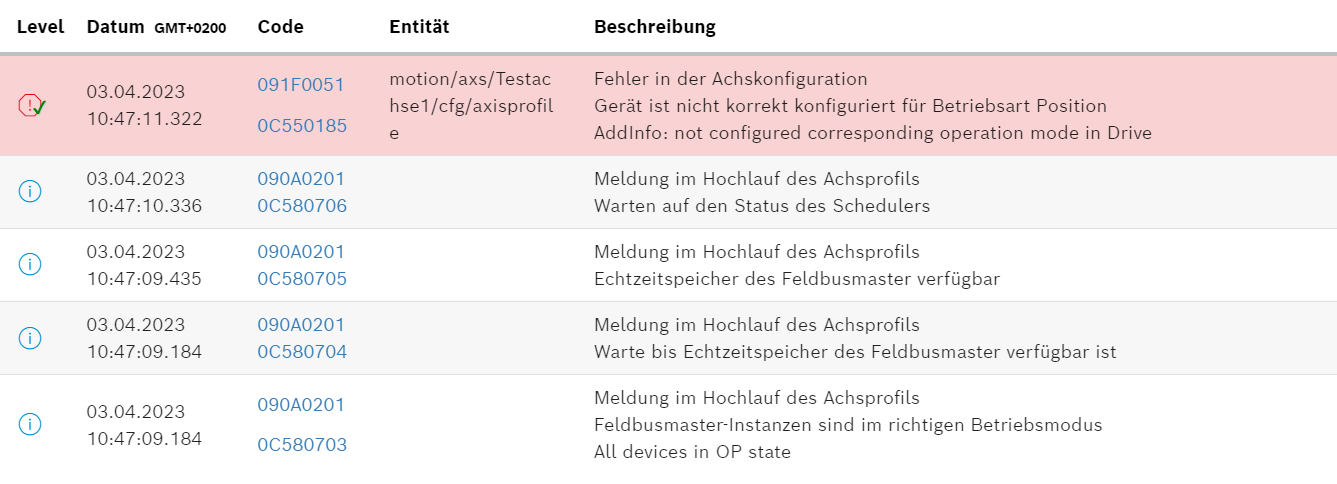
When i want to set the motion app to "Run" i get the error "091F0051/0C550185 (see Screenshot).
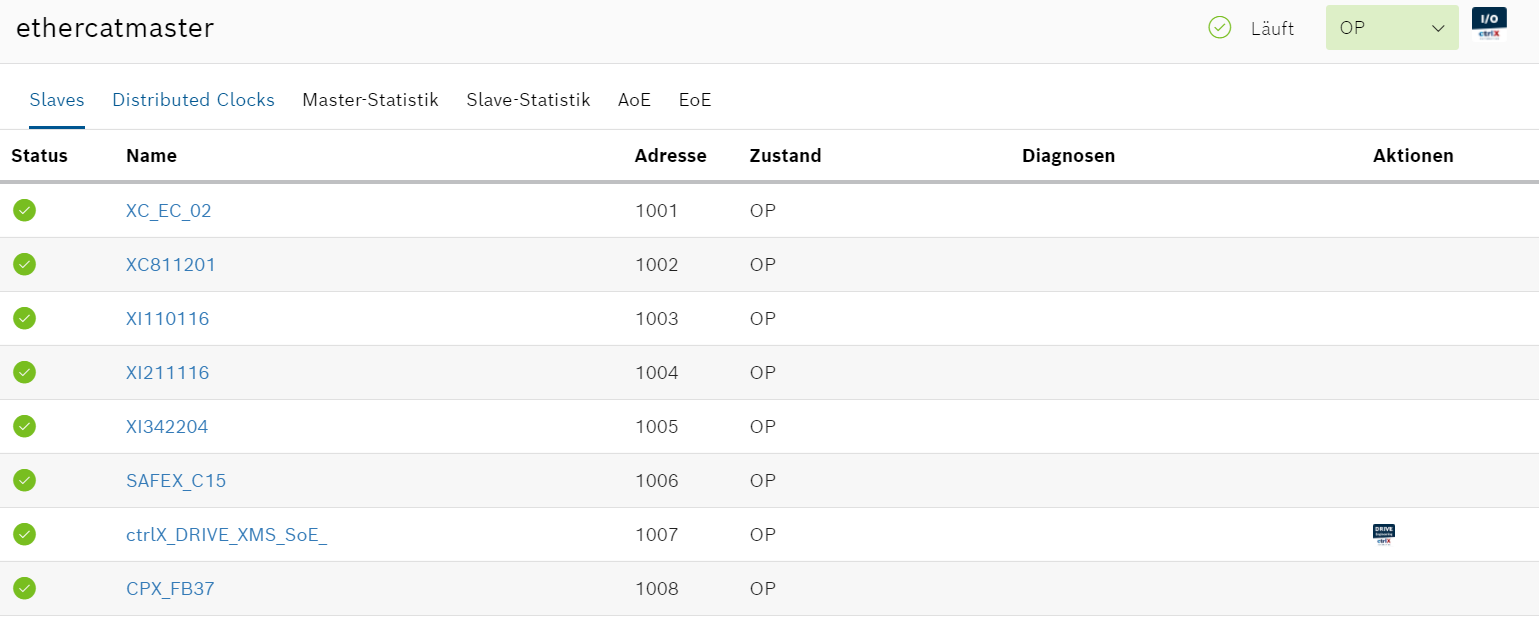
The EtherCAT is fully operational and has no fault.
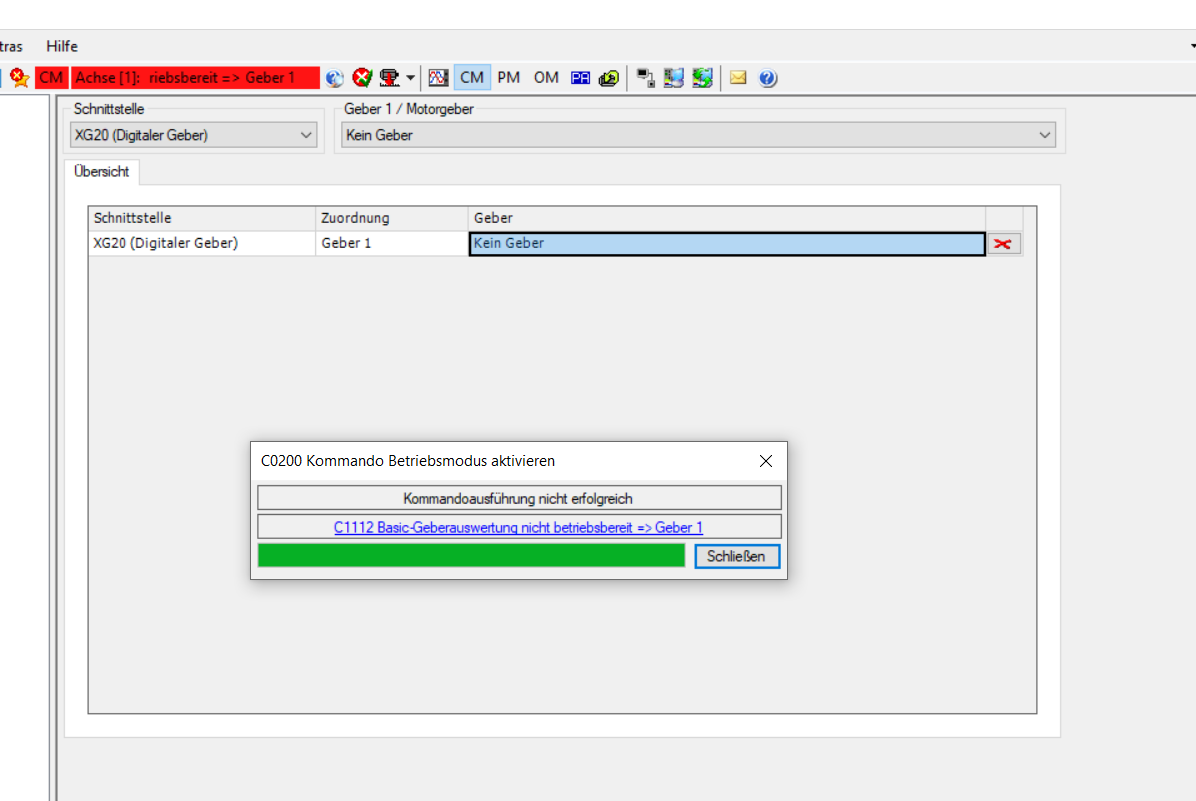
I tried to set the encoder interface to "XG20" and encoder 1 to "no Encoder" but when i want to set the drive to Operational i get a endoder fault "C1112".
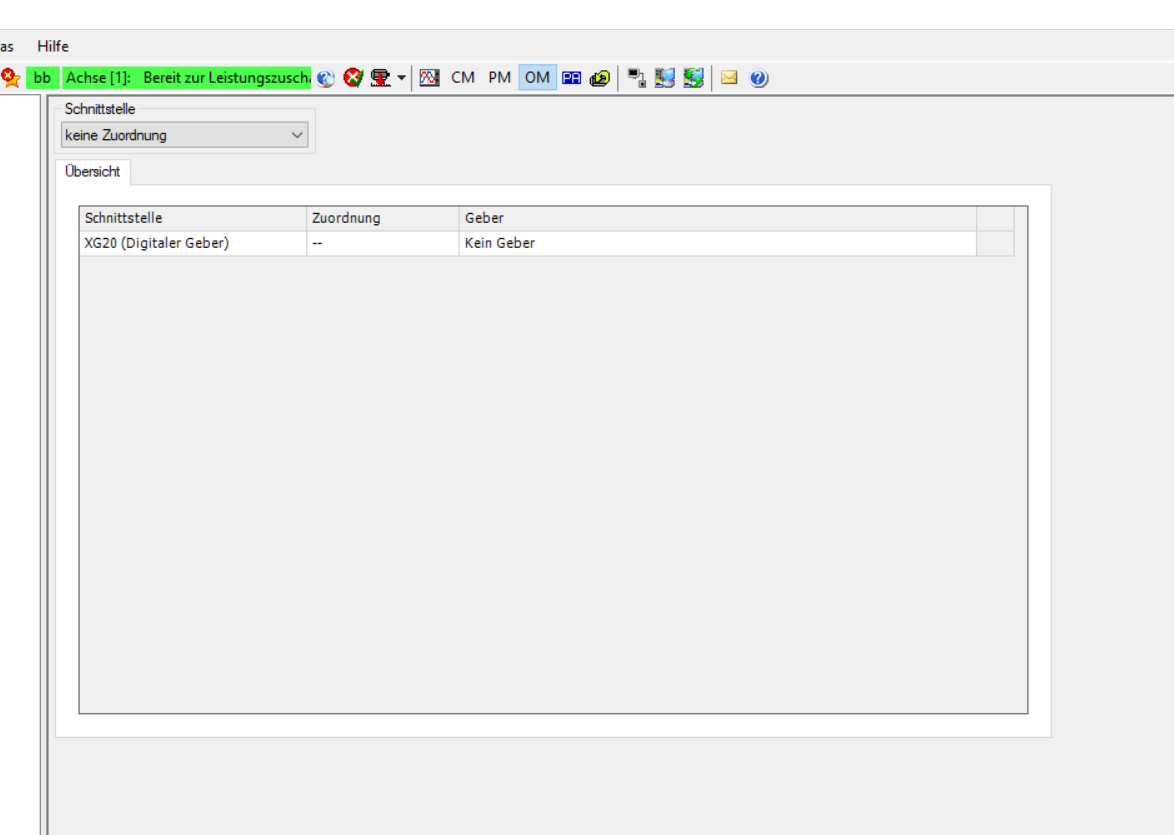
When the interface is set to "no assignment" the drive can be set with the Drive engineering to Operation Mode wihtout a fault.
I tried to find a option where i can set the Motion app to the "Velocity control" operation mode but i couldn´t find one.
Does anybody has a idea how to solve this problem an get the motor running?
Thanks.
Max
Solved! Go to Solution.
- Mark as New
- Bookmark
- Subscribe
- Mute
- Subscribe to RSS Feed
- Permalink
- Report Inappropriate Content
04-03-2023 11:24 AM - edited 04-03-2023 11:24 AM
- Mark as New
- Bookmark
- Subscribe
- Mute
- Subscribe to RSS Feed
- Permalink
- Report Inappropriate Content
04-03-2023 01:37 PM - edited 04-04-2023 09:48 AM
As cyclic position control lagless is the main and mandatory operation mode for our ctrlX MOTION your usecase is not possible right now, as the ctrlX DRIVE cannot be set up accordingly.
By the way, in the ctrlX IO Engineering you would have to look to the startup parameters of the SoE slave, as for a ctrlX DRIVE the main operation mode in standard will be set there to position lagless.
- Mark as New
- Bookmark
- Subscribe
- Mute
- Subscribe to RSS Feed
- Permalink
- Report Inappropriate Content
05-25-2023 03:20 PM
I haven't tried an Asynchronous motor without Encoder, but I have been successful running a drive with only Velocity Mode using the PLC Program by manually writing to S-0-0036. In this case there was no need to use the Motion App (meaning no need to set it up in the web interface). The key as pointed out with the Startup Parameters is to redefine or remove the S-0-0032 value since it's set for Position Mode Lagless as stated.
If you don't redefine S-0-0032 or remove it from the list every time the drive transitions to OM S-0-0032 will switch back to Position Mode.
I'm not sure of a further limitation regarding an Encoder otherwise that wouldn't allow you to run an Asynch motor without feedback.

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
- Mark as New
- Bookmark
- Subscribe
- Mute
- Subscribe to RSS Feed
- Permalink
- Report Inappropriate Content
06-23-2023 08:00 AM
Any news here or can this topic be closed?