FORUM CTRLX AUTOMATION
ctrlX World Partner Apps for ctrlX AUTOMATION
- ctrlX AUTOMATION Community
- Forum ctrlX AUTOMATION
- IndraWorks, IndraControl for MLC/MTX, IndraDrive
- Ethercat communication IndraDrive (CoE) with Staubli robot controller
Ethercat communication IndraDrive (CoE) with Staubli robot controller
- Subscribe to RSS Feed
- Mark Topic as New
- Mark Topic as Read
- Float this Topic for Current User
- Bookmark
- Subscribe
- Mute
- Printer Friendly Page
Ethercat communication IndraDrive (CoE) with Staubli robot controller
- Mark as New
- Bookmark
- Subscribe
- Mute
- Subscribe to RSS Feed
- Permalink
- Report Inappropriate Content
02-27-2024 03:52 PM
Hello,
I'm trying to setup the communication between a Staubli robot controller and an IndraDrive HCS01.1E-W0005-A-03-B-ET-EC-NN-NN-NN-FW BoschRexroth Indradrive CS Basic Universal Multi-Ethernet using EtherCat (CoE).
After few attemps now I am able to control the motor (Schunk) in velocity mode using CiA402 protocol, but I need to control it in position mode.
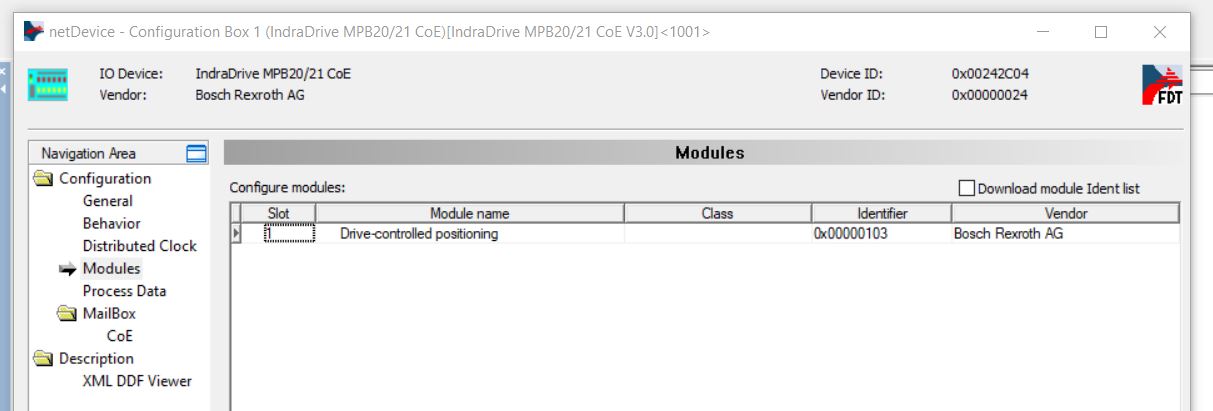
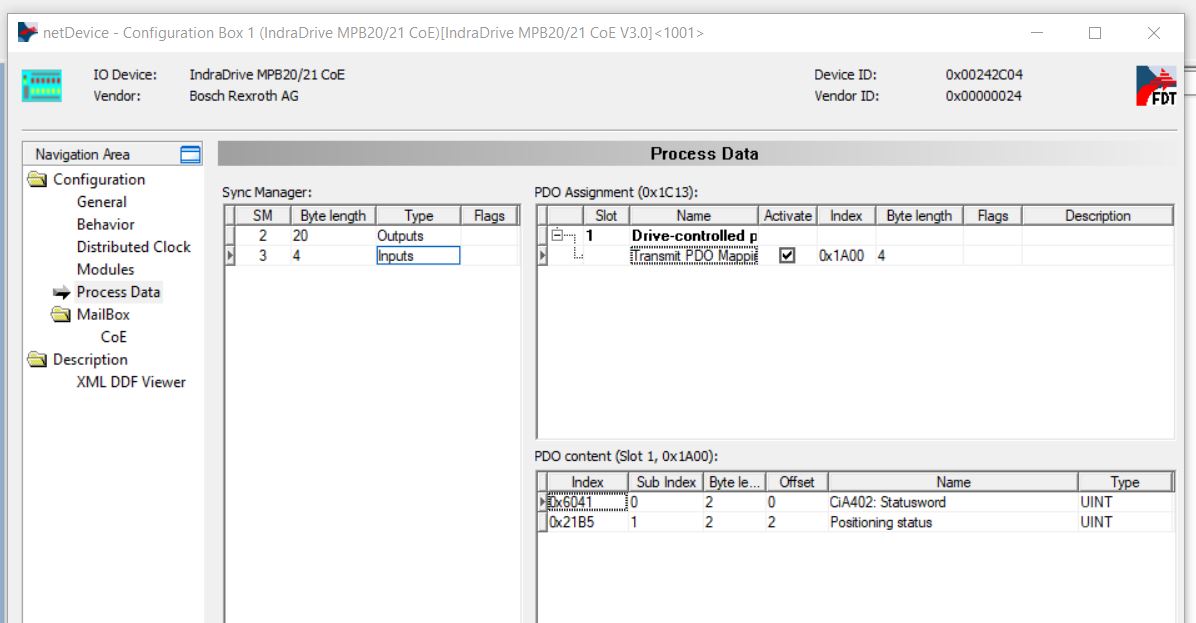
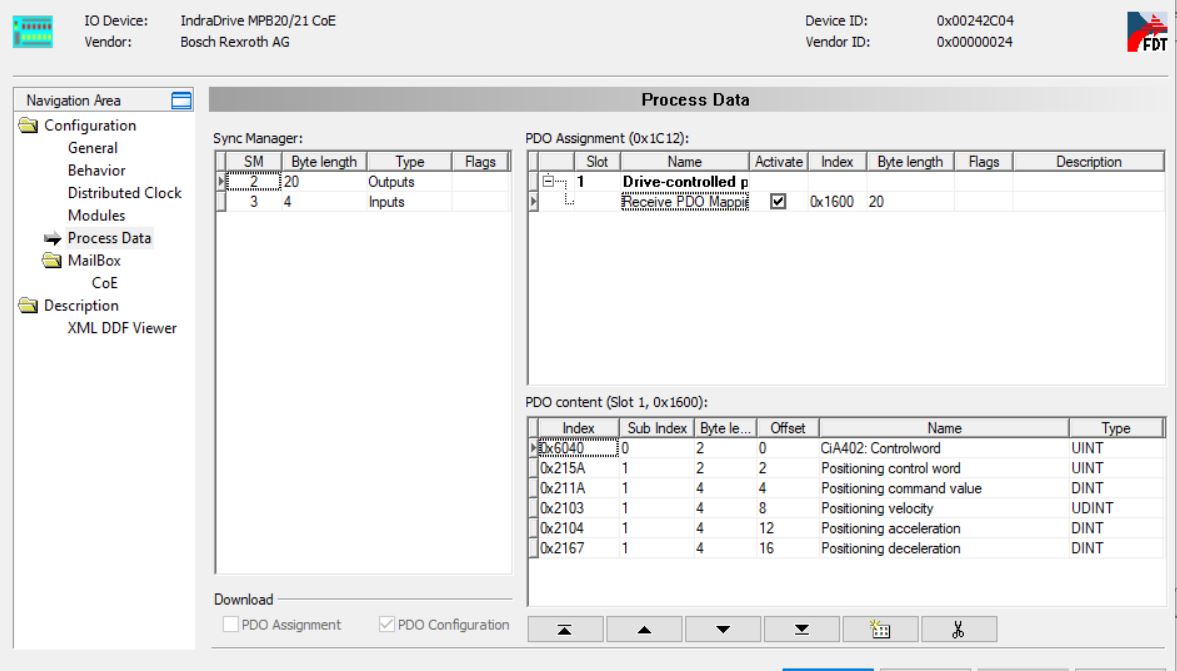
I found this configuration that seems allows the positioning passing the target position, acceleration, deceleration - see pic1-2-3.
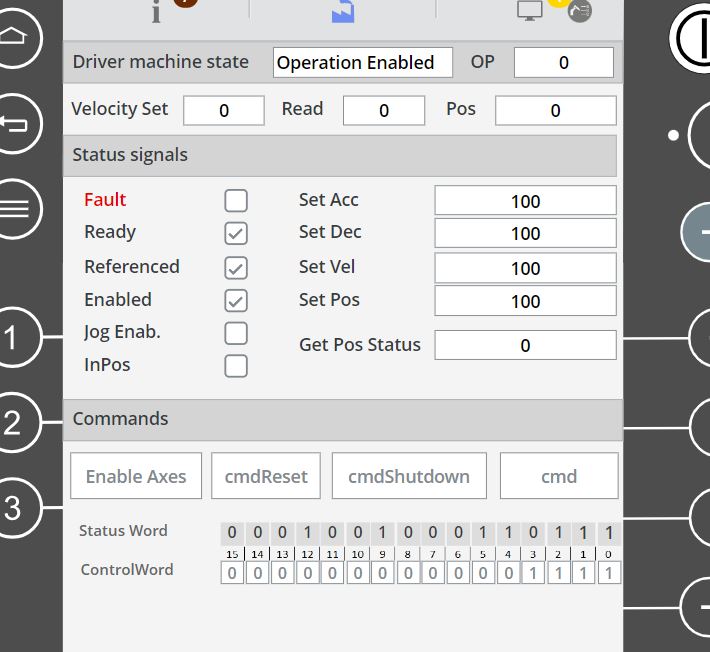
With this configuration I am able to reach the OperationEnabled state with motor in torque, but I can not understand how to start the positioning. Attached the input/output state with OpEnabled - pic4.
Any suggestion is very appreciated!
{kind=link}
{kind=link}
{kind=link}
{kind=link}
- Mark as New
- Bookmark
- Subscribe
- Mute
- Subscribe to RSS Feed
- Permalink
- Report Inappropriate Content
02-28-2024 07:28 AM
Moved to corresponding sub forum IndraWorks, IndraControl for MLC/MTX, IndraDrive.
Could you describe your setup a little bit more?
- Are you using Stäublis uniVal drive or uniVal PLC? So what is the exact topology?
- Which Stäubli control is involved?
- Are you even using one of our controls Like MLC/MTX/ctrlX CORE?
- Did you just replace the original drives by Rexroth ones?
It seems that you are using our drives just as a slave and are struggling in the usage of the Stäubli control. In this case please get in contact with the supplier for further support.