FORUM CTRLX AUTOMATION
ctrlX World Partner Apps for ctrlX AUTOMATION
- ctrlX AUTOMATION Community
- Forum ctrlX AUTOMATION
- ctrlX MOTION
- Re: Robot blending error using PlcOpen Library function block
Robot blending error using PlcOpen Library function block
- Subscribe to RSS Feed
- Mark Topic as New
- Mark Topic as Read
- Float this Topic for Current User
- Bookmark
- Subscribe
- Mute
- Printer Friendly Page
- Mark as New
- Bookmark
- Subscribe
- Mute
- Subscribe to RSS Feed
- Permalink
- Report Inappropriate Content
03-22-2021 12:08 PM
Hello ,
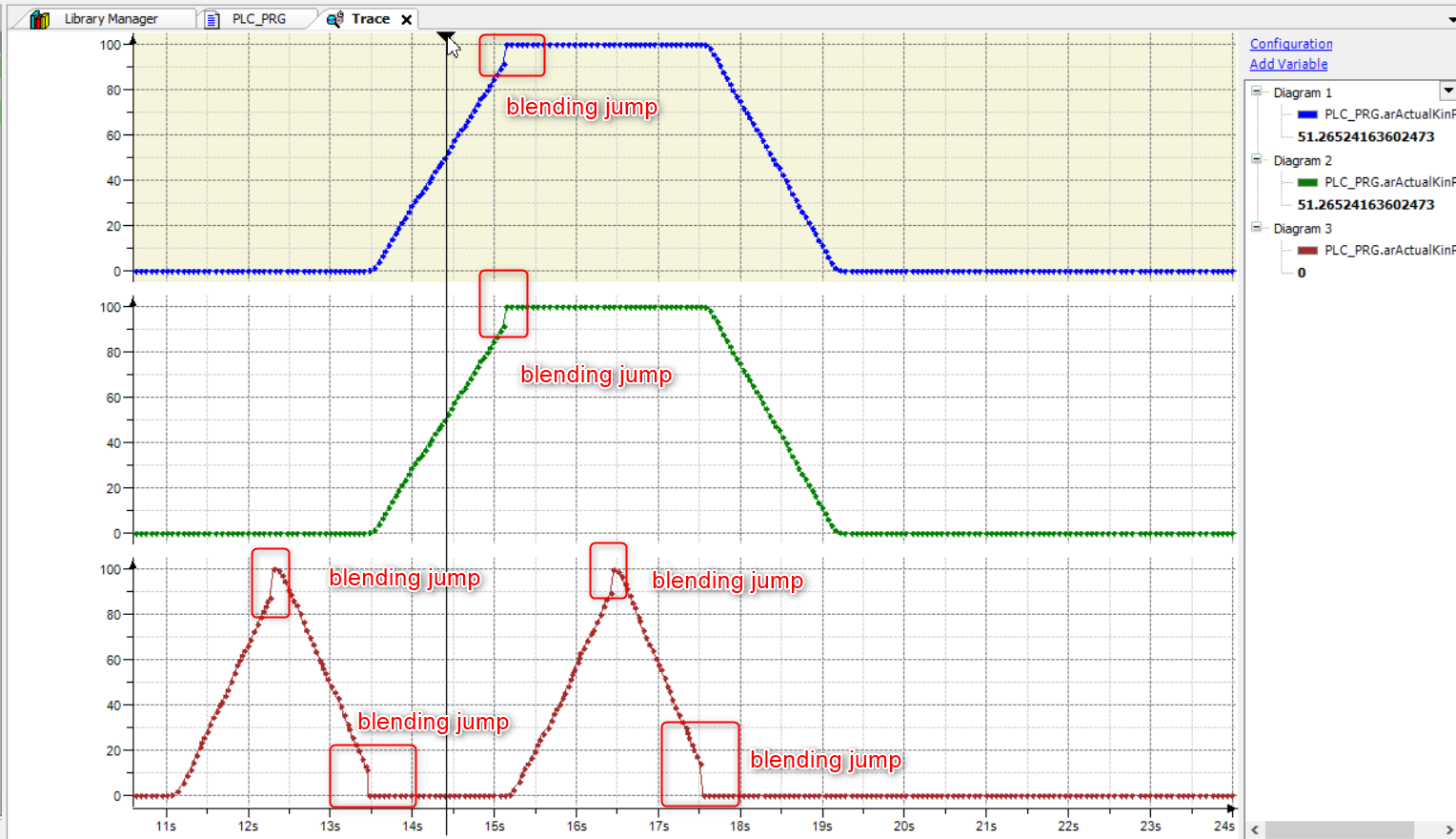
I'm trying to test the PlcOpen library to make a robot pick&place cycle but I got some strange behaviour while trying to blend the robot points
It seems that when the robot reach the begining of the blending area there is a position jump in the robot position. I don not know why ?
Could someoe help me to understamd what is wrong ?
I attached the plc program export and a screen shot of the robot path position feedback
Many Thanks
Giuseppe
Solved! Go to Solution.
- Mark as New
- Bookmark
- Subscribe
- Mute
- Subscribe to RSS Feed
- Permalink
- Report Inappropriate Content
03-22-2021 02:06 PM
Please tell us the verions of your installed apps. Or simply create an system report in the web interface of the ctrlX CORE:

- Mark as New
- Bookmark
- Subscribe
- Mute
- Subscribe to RSS Feed
- Permalink
- Report Inappropriate Content
03-22-2021 02:58 PM

- Mark as New
- Bookmark
- Subscribe
- Mute
- Subscribe to RSS Feed
- Permalink
- Report Inappropriate Content
03-22-2021 04:02 PM
Your system Report was made out of the ctrlX WORKS engineering tool package and not the ctrlX CORE web interface. But independently I will have a look at it.
- Mark as New
- Bookmark
- Subscribe
- Mute
- Subscribe to RSS Feed
- Permalink
- Report Inappropriate Content
03-22-2021 05:01 PM
- Mark as New
- Bookmark
- Subscribe
- Mute
- Subscribe to RSS Feed
- Permalink
- Report Inappropriate Content
03-23-2021 03:18 PM
I can reproduce the behavior here but will need some time to investigate. I will respond here as soon as possible.
- Mark as New
- Bookmark
- Subscribe
- Mute
- Subscribe to RSS Feed
- Permalink
- Report Inappropriate Content
03-23-2021 05:42 PM
OK , thanks .
I'll wait no problem
Best regards,
Giuseppe
- Mark as New
- Bookmark
- Subscribe
- Mute
- Subscribe to RSS Feed
- Permalink
- Report Inappropriate Content
03-25-2021 04:12 PM - edited 03-25-2021 04:27 PM
Sorry for the delay. I am quite busy.
First of all I like to tell you that some function blocks (MC_AddAxisToGroup) are missing, that adds your axes functional to the kinematic while runtime. So only the Robot will be interpolated but there will be no change in the axes values.
I forwarded the problem to our R&D.
- Mark as New
- Bookmark
- Subscribe
- Mute
- Subscribe to RSS Feed
- Permalink
- Report Inappropriate Content
03-26-2021 09:00 AM
Hello,
Sorry but I did not understand your last comment. It seems to me that the axis are groupped but is the blend the is not runnign as it shoul be.
I saw that not all the function are already available on the plcOpen library but the ones already in should be enough to move a robot but not to blend the path ( not working ) Is that right ?
Anoter question : If I use the CX_Motion library will the blend error still be present ?
Please if possible let me know when the development will solve the blend problem
Many thanks
Giuseppe
- Mark as New
- Bookmark
- Subscribe
- Mute
- Subscribe to RSS Feed
- Permalink
- Report Inappropriate Content
03-26-2021 09:49 AM
You have function blocks inside your program:
MC_Power for enabling power to all axes, MC_GroupEnable for enabling power of the kinematic, MC_MoveLinearAbsolute for moving the kinematic but for the PLC open statemachine (see documentation) there is one step missing. That is MC_AddAxisToGroup to add the axes to the kinematic after enabling them and before enabling the kinematic.
Blending should also work. See online documentation or docu inside of the library for more information.

{kind=link}
I tested your code (extended with addtokin) with real axes and they seemed to run smoothly. So probably this is only an read value topic. The plan is to analyse the problem next week. We will let you know.
With the CXA_MOTION or CXA_MOTION_INTERFACE I have never seen this problem before.
- Mark as New
- Bookmark
- Subscribe
- Mute
- Subscribe to RSS Feed
- Permalink
- Report Inappropriate Content
04-07-2021 08:32 AM
Hello,
I have som questions related to the initial topic, please could you answer it just to clarify me some point?
1. Do you have any news about the problem with the blending error with PlcOpen library ?
2. Is there any performance difference in the robot path planner behavior using the PlcOpen library or the CXA_Motion library ?
3. I tried the blending function using the CXA_Motion lib and I motinored both the path velocity and acceleration. In the trace I can see that in the blending points the velocity seems to be constast but I see a acceleration pick at each blending point ( programmed acceleratio ) .This could generate vibration in the robot mechanical parts. Is that due to the slope type used to blend ? Is it the block slope ? Will It be improved in the future with Continuos slope ( as in the MLC ) or something even better ?
Many Thanks
Giuseppe
- Mark as New
- Bookmark
- Subscribe
- Mute
- Subscribe to RSS Feed
- Permalink
- Report Inappropriate Content
04-07-2021 10:03 AM - edited 04-07-2021 10:04 AM
- Our R&D started investigating the issue and found that it is an display problem only. But due to holidays in germany they will go on next week.
- No performance difference.
- At the moment block slope is usable only. The continuous slope will follow in the next releases.
- Mark as New
- Bookmark
- Subscribe
- Mute
- Subscribe to RSS Feed
- Permalink
- Report Inappropriate Content
04-13-2021 12:50 PM
Sorry I lost the track of this topic for some days.
Our R&D has found an bug in our ctrlX MOTION app that causes this behaviour. The will be an fix in the next release milestone RM21.07 (version 1.10) end of July.
If there is an more urgent matter please get in contact with us directly again.