FORUM CTRLX AUTOMATION
ctrlX World Partner Apps for ctrlX AUTOMATION
- ctrlX AUTOMATION Community
- Forum ctrlX AUTOMATION
- ctrlX MOTION
- Re: Motion error when y-axis follows x-axis
Motion error when y-axis follows x-axis
- Subscribe to RSS Feed
- Mark Topic as New
- Mark Topic as Read
- Float this Topic for Current User
- Bookmark
- Subscribe
- Mute
- Printer Friendly Page
- Mark as New
- Bookmark
- Subscribe
- Mute
- Subscribe to RSS Feed
- Permalink
- Report Inappropriate Content
02-22-2021 09:46 AM
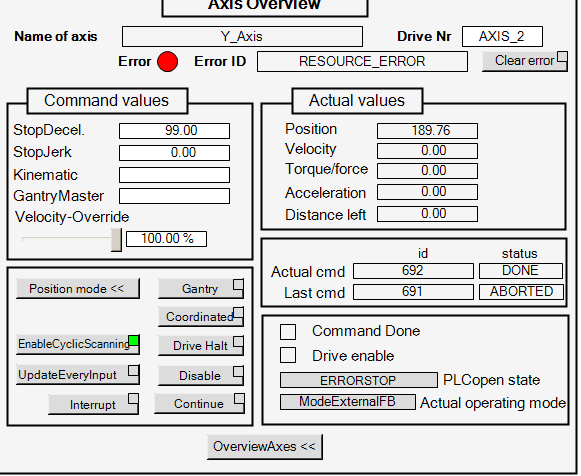
I'll keep getting an error while I command with one of my two axis when I try to turn it. And it feels like the moment the second axis gives an error is random. one time he gives an error message after a position of 6 and the other time after a position of 170 and than to position of 84, it feels really random. I've even had a few times that he just turns correctly to his position
To give you an idea of what I am trying to do I will briefly explain what needs to be done. A cable must be wound on a drum(x-axis). the cable is guided through a traverse(y-axis). The y-axis must follow the x-axis.What I have done now, I determine to which position the x-axis should go to get a correct cable length. then I send the x-axis to that position with arAxisCtrl_gb[X_Axis.AxisNo].PosMode.Position and right after that I send the y-axis to a certain factor of the actual x position. I get the actual position from Posistion_X := arAxisStatus_gb[X_Axis.AxisNo].Data.ActualPosition.
I have already looked into the error codes but that doesn't help me.
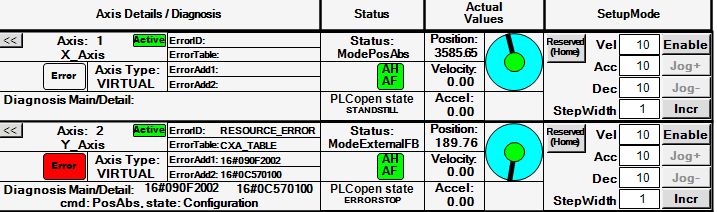
The x-axis rotates normally but the y-axis gives an error message every time it is rotating. See pictures to see the error codes and a bit of the code i use.
Solved! Go to Solution.
- Mark as New
- Bookmark
- Subscribe
- Mute
- Subscribe to RSS Feed
- Permalink
- Report Inappropriate Content
02-22-2021 11:10 AM
The error on your pictures means:
Invalid state
Cause/Remedy 1: Cause: An invalid status was returned. Remedy: Make sure that the correct status is reached in the PLC Open state machine.
Please have a look in the diagnostic log of the control to see if there are more information available and send a screenshot or export.
- Mark as New
- Bookmark
- Subscribe
- Mute
- Subscribe to RSS Feed
- Permalink
- Report Inappropriate Content
02-22-2021 11:31 AM
- Mark as New
- Bookmark
- Subscribe
- Mute
- Subscribe to RSS Feed
- Permalink
- Report Inappropriate Content
02-22-2021 11:41 AM
- Mark as New
- Bookmark
- Subscribe
- Mute
- Subscribe to RSS Feed
- Permalink
- Report Inappropriate Content
02-22-2021 12:54 PM - edited 02-22-2021 12:56 PM
The error codes are a bit confusing to us because we do not know what you are commanding exactly.
There is for example also a gantry command set in the system that does absolutely not fit to the application described.
There are also a lot of motion object reset without an error pending.
And also a lot of abort commands.
Could you please switch on the system trace of the motion app, create the error and download another log file with all additional information active? Then we can have an exact look which commands are sent when.


{kind=link}
{kind=link}
{kind=link}
- Mark as New
- Bookmark
- Subscribe
- Mute
- Subscribe to RSS Feed
- Permalink
- Report Inappropriate Content
02-22-2021 01:09 PM
- Mark as New
- Bookmark
- Subscribe
- Mute
- Subscribe to RSS Feed
- Permalink
- Report Inappropriate Content
02-22-2021 01:45 PM
I am sory to say that there are no traces included. Please beware that the trace settings are resetted after restarting the control if not saved via Configurations -> Save.
- Mark as New
- Bookmark
- Subscribe
- Mute
- Subscribe to RSS Feed
- Permalink
- Report Inappropriate Content
02-22-2021 02:07 PM
- Mark as New
- Bookmark
- Subscribe
- Mute
- Subscribe to RSS Feed
- Permalink
- Report Inappropriate Content
02-22-2021 05:05 PM
I will contact you directly. Something is not working.
- Mark as New
- Bookmark
- Subscribe
- Mute
- Subscribe to RSS Feed
- Permalink
- Report Inappropriate Content
02-22-2021 05:07 PM
oke, thanks. Im awating your message
- Mark as New
- Bookmark
- Subscribe
- Mute
- Subscribe to RSS Feed
- Permalink
- Report Inappropriate Content
02-26-2021 09:05 AM
With the help of CodeShepherd, the problem was identified. I use ctrlX in a virutal windows and this gave unwanted conflicts.
In 'normal' windows the program runs like a charm!
- Mark as New
- Bookmark
- Subscribe
- Mute
- Subscribe to RSS Feed
- Permalink
- Report Inappropriate Content
02-26-2021 09:29 AM - edited 03-01-2021 08:55 AM
After checking with you directly please remark following hint:
Note, that this application can/will lead to strange movement. The motion command always plan with an end velocity of 0 mm/s (full stop at the target position). This means, when a motion with a length of 15 µm is commanded and the acceleration is 25 mm/s², it will only get to a velocity of ~0,875 mm/s. When you have a higher initial velocity (because its a non-buffered command), this will lead to an overshoot. This means, the ctrlX MOTION breaks with the allowed limit deceleration, changes the direction and moves back to the target position.
Currently, there is no way implemented to command cyclic set points to the ctrlX MOTION.