
- Subscribe to RSS Feed
- Mark as New
- Mark as Read
- Bookmark
- Subscribe
- Printer Friendly Page
- Report Inappropriate Content
MATLAB® is a widely used software tool from the MathWorks® company for solving mathematical problems and evaluating results graphically. The Simulink® add-on module makes it possible to model and simulate technical, physical and other systems. This makes it suitable for simulating the dynamic behavior of electric drives and motors in combination with mechanical models. For this application, Bosch Rexroth offers customers a universal, parameterizable simulation model for its extensive drive portfolio for IndraDrive and ctrlX DRIVE as well as the associated motors.
The main motivation of this model is to enable users to
- evaluate the system dynamics of the drive attached to a mechanical system,
- tune the controller settings to enhance the behavior,
- evaluate and improve the stability of the system as a whole,
- ensure that the sizing of the drive is adequate for the process requirements.
The simulation model targets a mechatronic system view on the drive/mechanic combination performing a dynamic simulation. The drive sizing is meant to be selected before by using the Bosch Rexroth software IndraSize or the web-based ctrlX Configurator.
This model is the addition if a deeper analysis or more logic functionalities are needed in a simulation. The controller algorithms run virtually in digital sampling steps and include additional options (e.g. import/export a drive parameter configuration file).
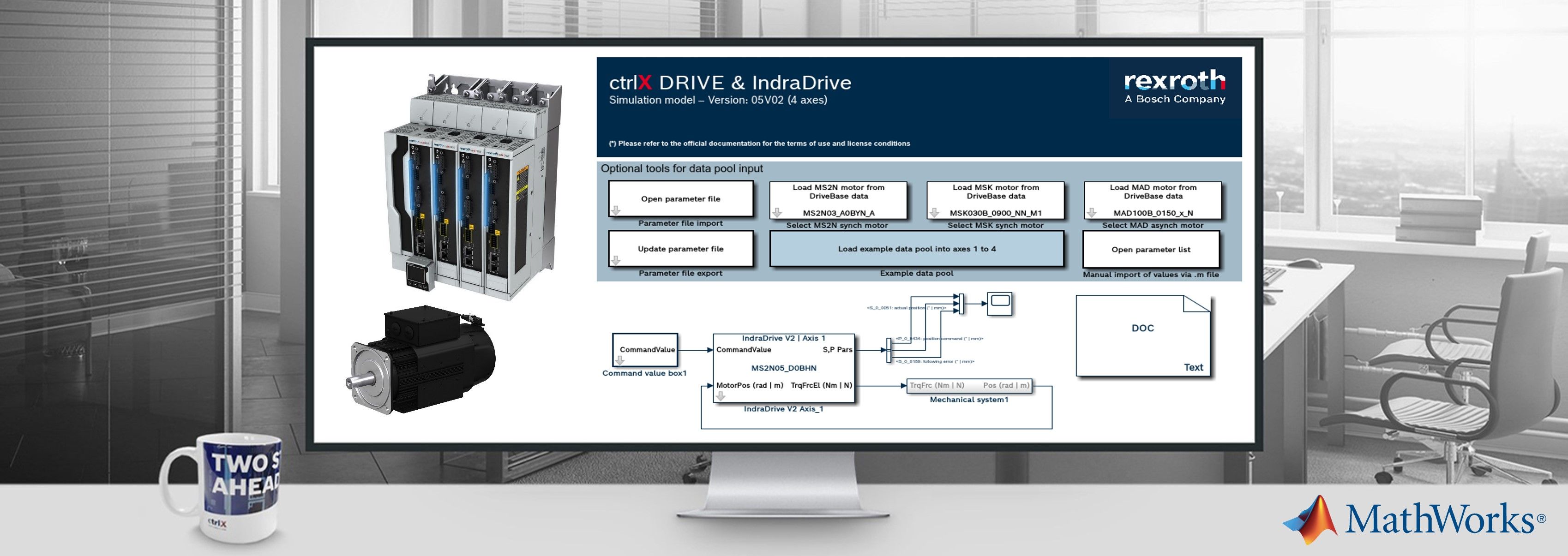
Simulation and Model structure
The keyword “simulation system” is used to indicate that the drive is attached to a mechanical subsystem, on which the process forces and torques are applied. This coupling between the electric drive and the mechanical subsystem is shown in the following picture: The behaviour model of the drive (inverter and motor) has the torque resp. force as the main output value and the motor position as an input of the drive model. The torque/force TrqFrc and motor position Pos are the interface variable names of the mechanical subsystem. The user needs to implement this mechanical subsystem in order to provide the motor position to the drive model.

The drive model is a modular description and consists of many modules that represent the system components (see figure below) mathematically.
The mechanical model and the process should first be defined and implemented by the user as designed for their application. The drive model includes a simple example for this. Furthermore, the motor models are built from a mechatronic point of view, this means, it focuses on the torque/force generation dynamics and the influence of the rotor resp. load inertia on the oscillation of the whole mechanical subsystem.

Graphical User Interface
The drive model offers the possibility to simulate up to eight drive axes simultaneously. In the delivery state, four axes are already pre-parameterized. Each axis can be conveniently configured using its own graphical user interface. The most important parameters for selecting the operating mode and parameterizing the control loops are thus available.

Notes
The license below includes the simulation model for the combination of electrical drives and motors from Rexroth. It is a rental license with an annual fee.
If you have any questions, please feel free to contact us at any time:
virtual.engineering@boschrexroth.de
 |
License for MATLAB/Simulink model REQUEST MODEL
|
MATLAB and Simulink are registered trademarks of The MathWorks, Inc.
See https://mathworks.com/company/aboutus/policies_statements/trademarks.html for further trademarks and registered trademarks that might be mentioned in this document.

You must be a registered user to add a comment. If you've already registered, sign in. Otherwise, register and sign in.