
- Subscribe to RSS Feed
- Mark as New
- Mark as Read
- Bookmark
- Subscribe
- Printer Friendly Page
- Report Inappropriate Content
Overview
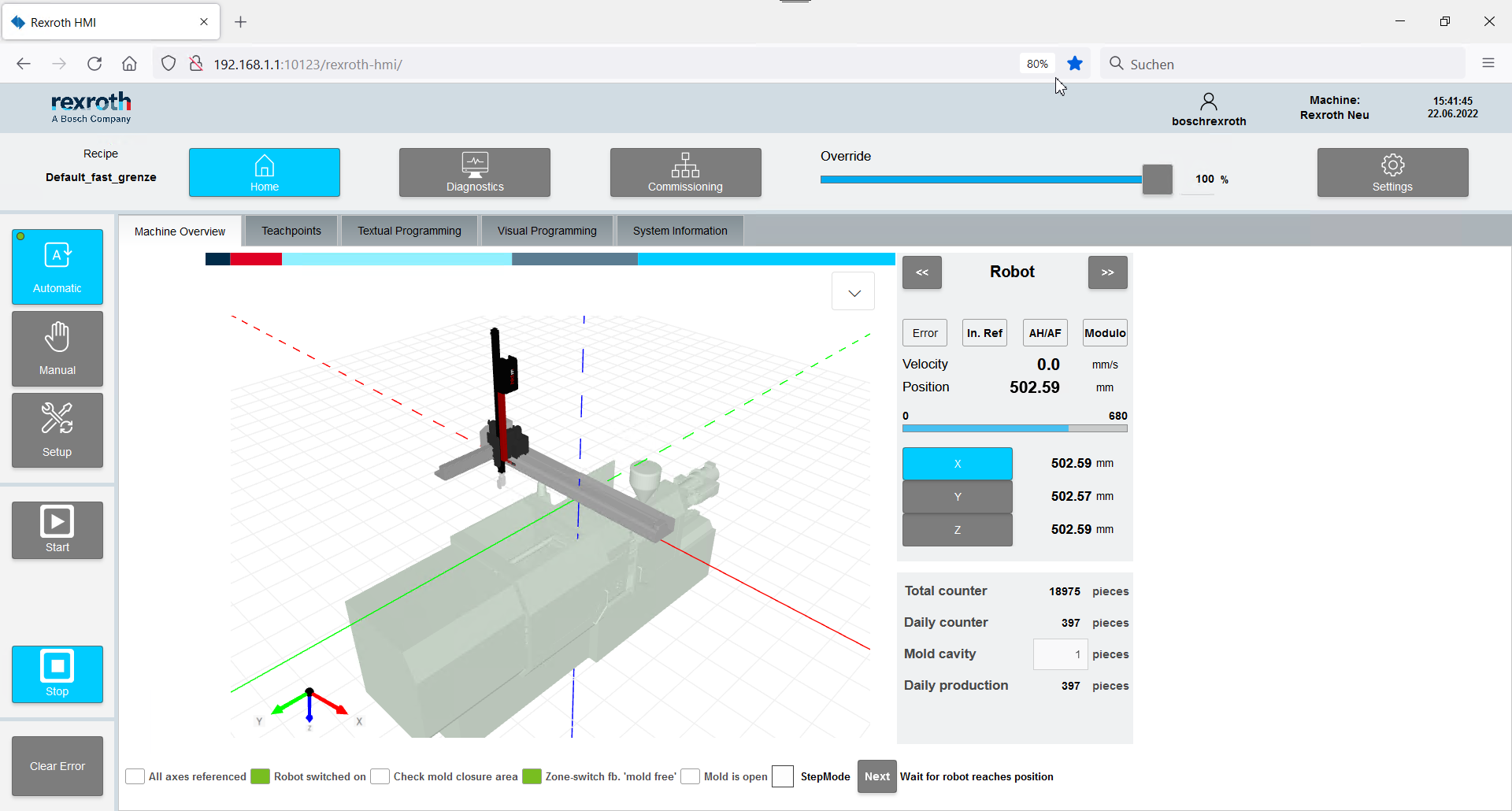
Here the base template for cartesian handling systems for ctrlX AUTOMATION can be found. It is based on the ctrlX CORE release version 1.12 (RM21.11) and is including a PLC and a HMI project and is created for the usage in injection molding machines. Please have a look to the "README.md" and "Basic-Hints-Template-Handling.docx" for further information and instruction.
Features
- Jog axis in mode Setup (X, Y, Z) (HMI menu item: Home/Machine Overview)
- Jog kinematic in mode Manual (Robot) (Home/Machine Overview)
- Table to edit teach points (Home/Teachpoints)
- PLC example code moving between 3 different points (Pos-Home, Pos-Mold-Up, Pos-User-10) See FB_Machine_Customer.mAutoPlc()
- Recipe handling with Open, Save, SaveAs and Delete in mode Manual & Setup (Home/Machine Overview) (PLC recipe structure GVL_GatCore.stRecipe)
- Last loaded recipe is automatically loaded at ctrlX startup
- Alarm handling (Diagnostics Alarms Online/Alarms History)
- Predefined HMI languages: German, English and Turkish (Settings/General Settings)
- HMI Usermanager which allows to add, edit, delete… users (Settings/Usermanager)
- 3D viewer showing the moving kinematics (Hint: URL must be adapted in WebIQ)
- PLC example code to manage Python interpreter (create instance, start script, …) See FB_Machine_Customer.mAutoPython()
- Axis/Kin configuration checking at startup of PLC program. Problems are shown in HMI.
- Communication check: HMI is locked, when not connected to PLC
- Euromap interface prepared for OPC UA
Preparation
- A ctrlX CORE or a ctrlX COREvirtual is needed
- A licensed installation of following apps (v1.12.x) is expected:
- Mandatory:
- ctrlX CORE - MOTION (1.12.5)
- "ctrlX CORE - Motion Standard License 4 Axes"
R911400503 - SWL-XC*-MOT-STDMOTION****-NNNN - "ctrlX CORE - Motion Cartesian License (add-on)"
R911400509 - SWL-XC*-MOT-CARTESIAN****-NNNN
- "ctrlX CORE - Motion Standard License 4 Axes"
- ctrlX CORE - OPC UA Server (1.12.5)
- "ctrlX CORE - OPC UA Server License"
R911397816 - SWL-XC*-UAS-OPCUASERVER**-NNNN
- "ctrlX CORE - OPC UA Server License"
- ctrlX CORE - PLC (1.12.4)
- "ctrlX CORE - PLC Basic License"
R911397817 - SWL-XC*-PLC-PLC**********-BANN
- "ctrlX CORE - PLC Basic License"
- Smart HMI - WebIQ Server (2.11.3)
- "Smart HMI - WebIQ ctrlX CORE Server License 500 Tags"
R911410793 - SWL-W-XC*-WIQ**RUD*500***-NNNN
- "Smart HMI - WebIQ ctrlX CORE Server License 500 Tags"
- ctrlX CORE - MOTION (1.12.5)
- Optional:
- ctrlX CORE - 3D Viewer (1.12.2)
- "ctrlX CORE - 3D Viewer License"
R911413191 - SWL-XC*-3DV-3DVIEWER*****-NNNN
- "ctrlX CORE - 3D Viewer License"
- ctrlX CORE - EtherCAT Master (1.12.4)
- "ctrlX CORE - EtherCAT Master Basic License"
R911400508 - SWL-XC*-ECM-ETHERCATMAS**-BANN
- "ctrlX CORE - EtherCAT Master Basic License"
- ctrlX CORE - Python Runtime (1.12.4)
- "ctrlX CORE - Python Runtime License"
R911404540 - SWL-XC*-PYR-PYTHONRUNTIME-NNNN
- "ctrlX CORE - Python Runtime License"
- ctrlX CORE - 3D Viewer (1.12.2)
- Mandatory:
- On host PC an installation of:
- ctrlX WORKS (1.12.7)
- Smart HMI - WebIQ Designer (2.11.3)
Unpacking
- Download the archive "Base-Template-Handling-V1.0.zip" you can find below and unpack it to your engineering PC
- Download the "libraries 1.14.zip" and add them to the library repositiory of your ctrlX PLC Engineering
- Follow instructions in "Basic-Hints-Template-Handling.docx" to set up your ctrlX CORE accordingly
- Extract "PLC-template.projectarchive" with ctrlX WORKS
- Import "HMI-template.zip" with WebIQ designer

Notes
- These templates are made for the system version 1.12 (RM21.11.6) and the corresponding apps
- Beware of moving mechanics when using automated motion commanding
- If 3D-viewer is not showing the model correctly please open the demo model once directly over the webUI of the ctrlX CORE an/or change the link of the iframe in the WebIQ project to
"http://192.168.1.1/3dviewer/Demo Model"
Related links
- ctrlX Store
- ctrlX WORKS
- Smart HMI - WebIQ Designer
- Collaboration room
- ctrlX AUTOMATION online documentation
- Collection of How-to videos, blogs and examples for ctrlX AUTOMATION
- FAQ Licensing with ctrlX AUTOMATION
- Solution sets for Cartesian handling applications
- Template for cartesian handling systems V1.20.0

You must be a registered user to add a comment. If you've already registered, sign in. Otherwise, register and sign in.