
- Subscribe to RSS Feed
- Mark as New
- Mark as Read
- Bookmark
- Subscribe
- Printer Friendly Page
- Report Inappropriate Content
In the following article we show you how to
- setup
- parameterize and
- execute first movements
using a ctrlX DRIVE solely controlled via the ctrlX DRIVE Engineering tool.
If you want to have a look to a detailed step by step procedure download the zipped document in the attachment.
Prerequisites:
A connection to the ctrlX DRIVE has been successfully established and the device is successfully powered on. The engineering tool ctrlX DRIVE Engineering has been started.
It is recommended that it is best that you download the zipped parameter files in the attachment to a well known directory! In here the directory (C:) has been used. Unzip these files!
1. Load pre-defined parameter set:
Please start by selecting one of the following preset parameter files in the directory you unzipped the attachments to. Use the parameter file most fitting to your application. You may select inbetween:
- Linear axis
- Rotary axis absolute
- Rotary axis modulo
- Spindle
2. Adopt to the motor present:
To adjust the settings to the really present motor use the following sequence:


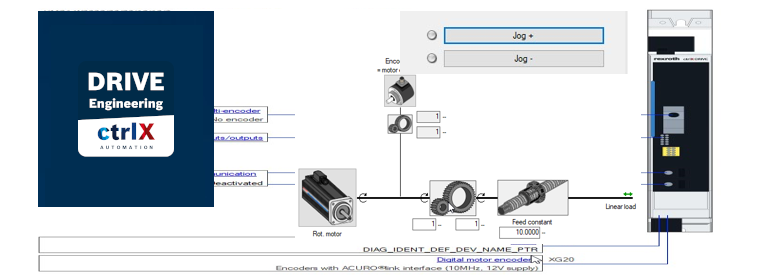
3. Adjust the mechanical transmission elements and the scaling:
Select the menu "Axis mechanics / scaling" and set the travel range, the gear ratio and the feed constant according to the necessities of your application.

Correct the scaling, e.g. the units or the resolution, by selecting the sub menu "Scaling extended"!

4. Adjust limits:
In a next step it is recommended to set the limits for speed and position correctly.

Mind that if you are working with a rotary axis in modulo format or with a spindle the position limitation doesn't need to be monitored! As well as the torque limitation may be set to prevent damage to the mechanical transmission elements.

5. Adjust drive halt and error reaction settings:
Check the settings of the so called "Drive Halt" if set correctly for the acceleration.

Check as well if the error reaction and the Emergency stop deceleration is set correctly.

6. Set absolute position:
If you have got an absolute encoder present, key in the approximate actual position and press the button "Set absolut position for encoder 1"!

If you have got an incremental present only, you may use the settings shown in the following step: Key in the intended actual position in "Reference distance"! Then press the button "Drive-controlled homing for encoder 1"!

Now the axis is in reference at the in before keyed in actual position, in here at 15 mm.
7. Jogging:
Get to menu "Easy startup mode" and set Travel mode to "Drive-controlled positioning" and "Jogging".
Parameterize the veloctiy, acceleration, deceleration and jerk with suitable values for your application.

Now you can jog the axis by pressing button "Jog +" or "Jog -".

8. Check direction:
Check if the axis is moving in the right direction. If this is not the case, change the "Negation" from former state "No" to "Yes", or if actual state was "Yes" to "No".

Mind that after changing the "Negation", you will have to do the absolute position setting again! See above.
9. Check mechanical transmission elements:
Going to a dedicated start position is possible via using the "Travel mode" "Command value input".

Now key in a new dedicated positioning cmd value, in here 25.0000 mm is used, and press button "Start".

After axis moved to the new position check if the movement was really the distance you are expecting. If the distance was not correct, you have to correct the mechanical transmission elements, either the gear ratio or the feed constant is wrong. Eventually even the travel range is not set correct. Mind that, if you change parameters in here, you have to set the absolute position again. See above.
10. Check of end positions:
If the axis is correctly parameterized, the axis should stop shortly before coming to the limits. In here you can see, that it stopped 0,01 mm in front of the 501,00 mm even if running with higher speed. Check if this is correct and correlating to the mechanics.

11. Sethoming procedure if encoder is only incremental:
If only an incremental encoder is present one should now execute the final correct homing procedure. Parameterize the home switch in the I/O settings of the drive. Follow the example for the settings below.
Now the "Drive-controlled homing for encoder 1" should be working.

Related Links

You must be a registered user to add a comment. If you've already registered, sign in. Otherwise, register and sign in.